Alustamine - PhotoRobot kasutajatugi
PhotoRobot Controls rakendus (tuntud ka kui "CAPP") on loodud sisutootmise protsesside (pildid, videod, 360-d ja 3D-mudelid) automatiseerimiseks. See juhend koosneb neljast osast, millest igaüks esindab protsessi.
- SEADISTAMINE – Loo tööruum: kaamerad, riistvara ja projektid
- CAPTURE - PhotoRobot riistvara ja kaamerate juhtimine, piltide ja videote jäädvustamine
- EDIT – visuaalse sisu järeltöötlus
- PUBLISH – Väljundpiltide loomine mitmes vormingus, "profiilide haldamine"
rakenduse PhotoRobot juhtelementide installimine
Rakenduse PhotoRobot Controls installimiseks arvutisse logige sisse oma PhotoRobot kontole ja minge jaotisse PhotoRobot Downloads.
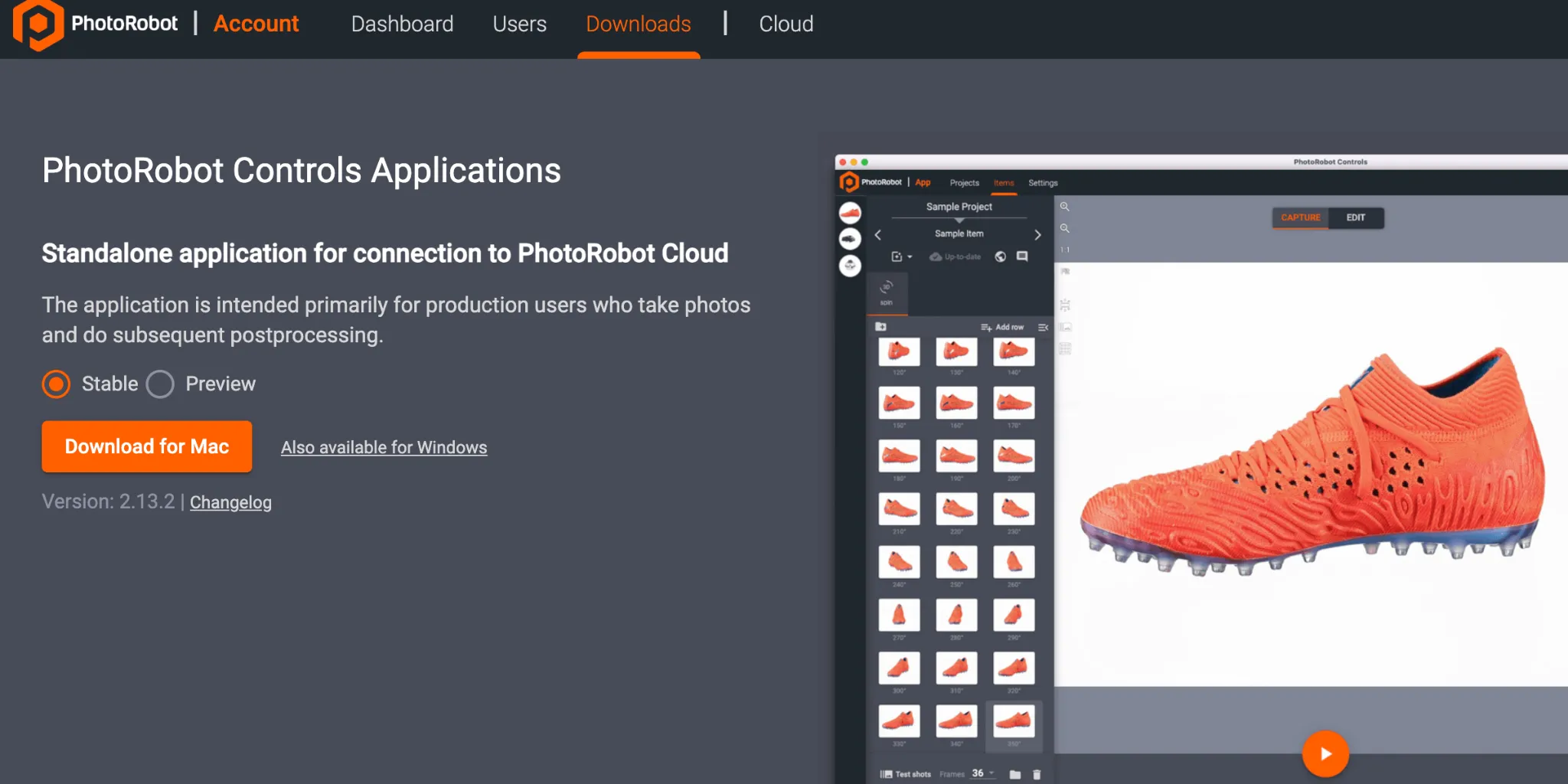
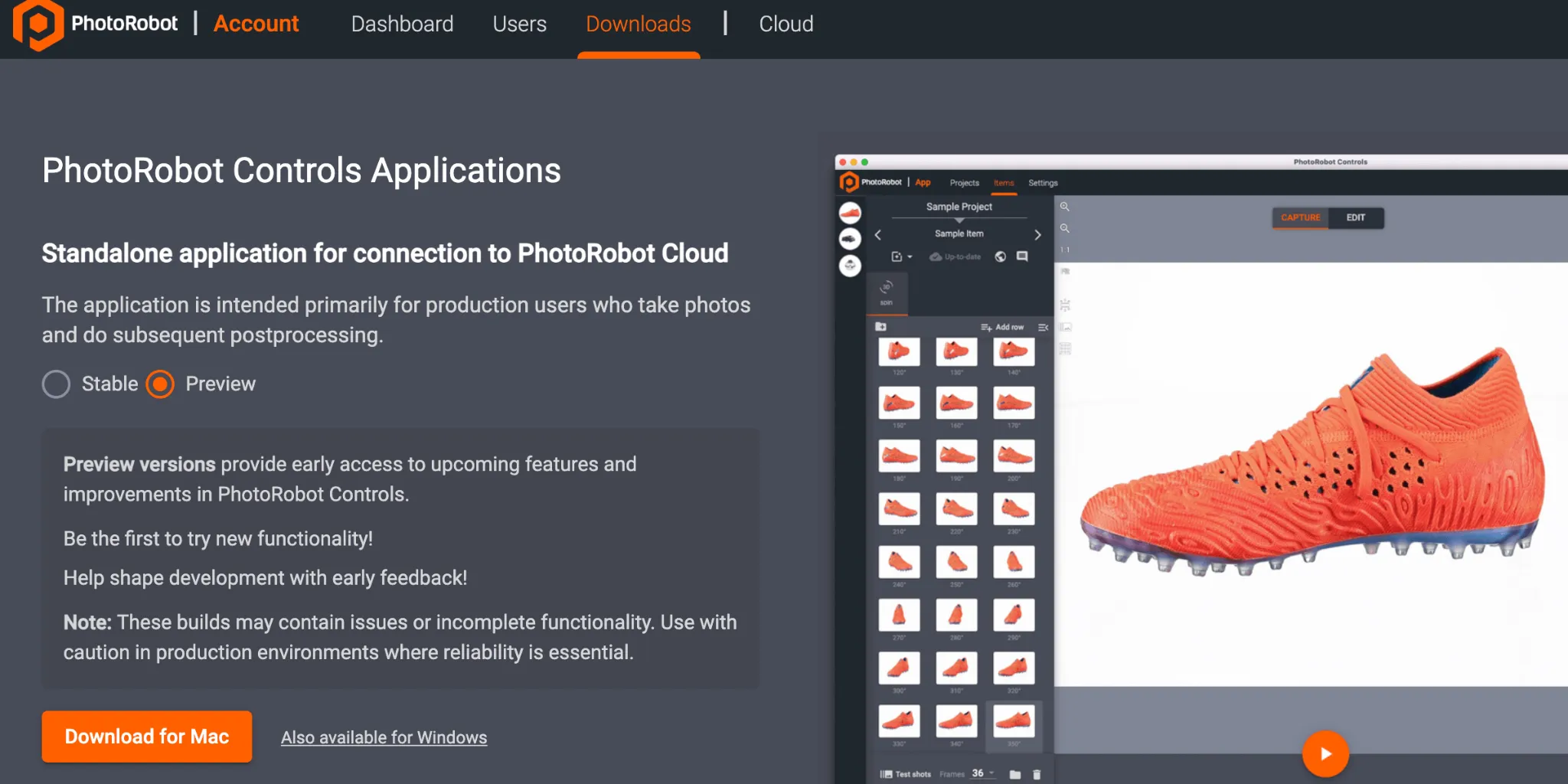
Märkus: Nii CAPP-i stabiilne versioon kui ka eelvaade on allalaadimiseks saadaval installiviisardi kaudu. Stabiilne versioon sisaldab CAPP-i uusimat versiooni ja saab sageli versioone. Samal ajal pakub CAPP-i eelvaateversioon varajast juurdepääsu uusimatele funktsioonidele ja parandustele, mis kantakse stabiilsele versioonile üle mõne päeva jooksul pärast arendamist. See võimaldab kasutajatel enne toega ühendust võtmist testida kõiki eelvaateversioonis ilmnevaid probleeme, kuna enamik stabiilse versiooni teatatud probleeme on eelvaateversioonis juba lahendatud. Pidage siiski meeles, et eelvaateversiooni ei soovitata kasutada tootmises, kus stabiilsus on kriitiline tegur. Eelvaate versioon on aktiivses arenduses, mis võib endiselt sisaldada mittetäielikke funktsioone või lahendamata vigu.
Tähtis: CAPP-i vanemad versioonid ei ole mõeldud klientidele ega avalikuks levitamiseks andmebaasi riknemise ohu tõttu. CAPP-i vanemad versioonid on kättesaadavad ainult volitatud PhotoRobot tehnikutele sisemiseks arenduseks või äärmiselt erilistel kasutusjuhtudel.
Viimase stabiilse versiooni ja eelvaate CAPP-i leidmiseks vaata CAPP Latest Download Versions.
Iseinstallimise tugi ja tõrkeotsing
Installiprotsess algab installifaili allalaadimisega.
Pange tähele CAPP-i installimise nõudeid:
- Kasutajal peavad olema CAPP-i installivas arvutis administraatori õigused.
- Arvuti peab vastama kõigile PhotoRobot süsteemi- ja riistvaranõuetele.
- Arvutis peab töötama toetatud operatsioonisüsteem koos uusimate värskendustega.
Tähtis: Pange tähele ka seda, et CAPP ei koosne mitte ainult robotjuhtimisfunktsioonidest, vaid ka kaamerate, tulede ja muude välisseadmete draiveritest. Seetõttu ei toetata sageli uusimat Mac OS-i versiooni kohe. Kui see aga juhtub, on see ainult ajutine ja seni, kuni kõik asjaomased müüjad ühilduvad teegid välja annavad.
Kuigi see võib olla ebamugav, on see CAPP-i kasutamisel palju vähem ebamugav kui ühilduvusprobleemid. Madalamale tasemele viimine on ka veelgi keerulisem kui enneaegse uuendamise vältimine.
Pärast operatsioonisüsteemi ja süsteeminõuete täitmist jätkub installimine installiviisardi kaudu. Logige sisse PhotoRobot kontole ja jätkake seadistamist, järgides alltoodud samme.
Seadistus
Kasutaja nõusoleku kinnitamine
CAPP-i allalaadimisel nõuab uue kasutajakonto aktiveerimine kasutaja kinnitust lõppkasutaja litsentsilepingu (EULA) ja muude seotud dokumentide kohta.
Pärast konto aktiveerimist on seejärel võimalik vaadata oma esitatud nõusolekuteavet CAPP-i pilveversiooni kaudu kontoprofiili seadetes.
Nõusolekuteabe kontrollimiseks avage CAPP-i pilveversioon ja klõpsake liidese paremas ülanurgas kasutajakonto ikoonil. Järgmisena valige menüüvalikute hulgast Minu profiil .

Profiilimenüüs kuvatakse profiilifoto, üldine kasutajateave (nimi, telefon, ettevõte), parooliseaded ja nõusolekuteave. Nõusoleku teave hõlmab järgmist.
- Arvuti hostinimi
- Kokkulepitud kuupäev
- PhotoRobot rahvusvahelise programmi litsentsileping
- Nõusolek isikuandmete töötlemiseks
- Teave isikuandmete töötlemise kohta
Ühilduvad kaamerad
Tähtis: Tagamaks, et CAPP suhtleb kaameraga õigesti, sulgege kõik muud kaameraga ühenduse loovad programmid. Samuti kasutage kindlasti ühilduvat kaamerat PhotoRobotiga ühilduvate kaameramudelite loendist.
Märkus: Alates PhotoRobot Controls App 2.5.4 väljalaskest saab nüüd toetada mis tahes kaamerat kolmanda osapoole kaamera integreerimise kaudu. Automaatse fotograafia jaoks on aga uusimad peeglita Canoni kaameramudelid kõige usaldusväärsemad ja tõhusamad.
Kuigi PhotoRobot soovitatud pihukaameraid on võimalik kasutada Wi-Fi või kaabelühenduse kaudu, võib see tekitada probleeme.
- Wi-Fi ühendus võib katkeda sageli (peamiselt ajalõpu tõttu). Need nõuavad aeganõudvat süsteemiga uuesti ühendamist.
- Kui kasutate käeshoitavat kaamerat kaabliühenduse kaudu, on kaabli pikkuse komplikatsioon ja ühenduste oht.
iPhone'i ühendamiseks PhotoRobot Touch Appi kaudu pange tähele, et ükski neist probleemidest ei esine. iPhone on võimeline käeshoitavaks fotograafiaks pideva valgustusega seadistuses. Kui aga on vajalik välkfotograafia, võivad ühilduvad käeshoitavad kaamerad olla soovitatud peeglita kaamerate alternatiiviks. Pidage lihtsalt meeles probleeme, mis võivad tekkida Wi-Fi ja kaabelühendusega käeshoitavate mudelitega.
Ühilduvad tuled
Et CAPP saaks valgustusega suhelda, kasutage kindlasti PhotoRobotiga ühilduvaid stuudiovalgusteid. Nende hulka kuuluvad kahte tüüpi valgustid: FOMEI ja Broncolori välklambid ning mis tahes tüüpi LED-valgustid DMX-toega.
Kaugtoe seadistus
Vahetult pärast PhotoRobot Controlsi paigaldamist soovitatakse kasutajal alla laadida ja paigaldada Splashtop SOS (EL-regiooni) rakendus. Splashtop SOS (EU) võimaldab PhotoRobot tehnikutel pääseda ligi kliendi arvutile ja pakkuda tehnilist abi pärast seda, kui kasutaja annab konkreetse juhtumi jaoks loa.
Splashtop SOS-i allalaadimine samal ajal PhotoRobot Controls'iga aitab vältida viivitusi kaugtehnilise toe taotluste puhul. Näiteks kui kasutajal ei ole piisavalt õigusi rakenduse installimiseks. Pärast Splashtopi installimist saavad meie tehnikud koheselt kasutada Splashtop Business'i, et pääseda ligi arvutile tehnilise toe taotlusega.
Siiski pidage meeles, et kasutaja peab alla laadima Splashtop SOS rakenduse EL-regiooni versiooni. USA-regiooni versiooni rakendus ei võimalda meie tehnikutel teie arvutile juurde pääseda.
Seega veenduge, et kasutate Splashtop SOS-i allalaadimiseks järgmist EL-i piirkonna linki:
Märkus: Lisateabe saamiseks PhotoRobot süsteemide kaugtoe seadistamise kohta vaadake PhotoRobot Remote Support Setup'i.
Tööruumi loomine
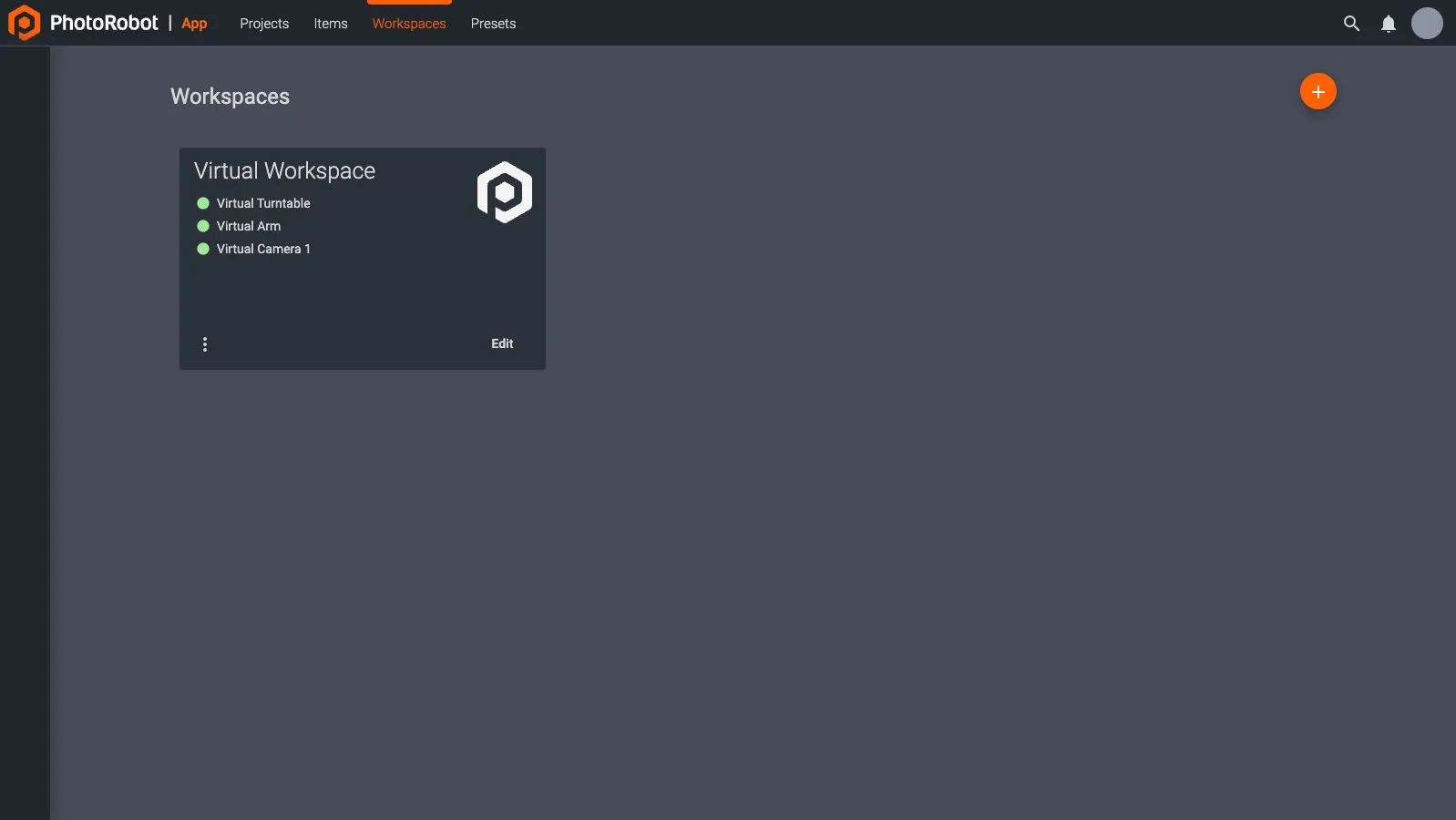
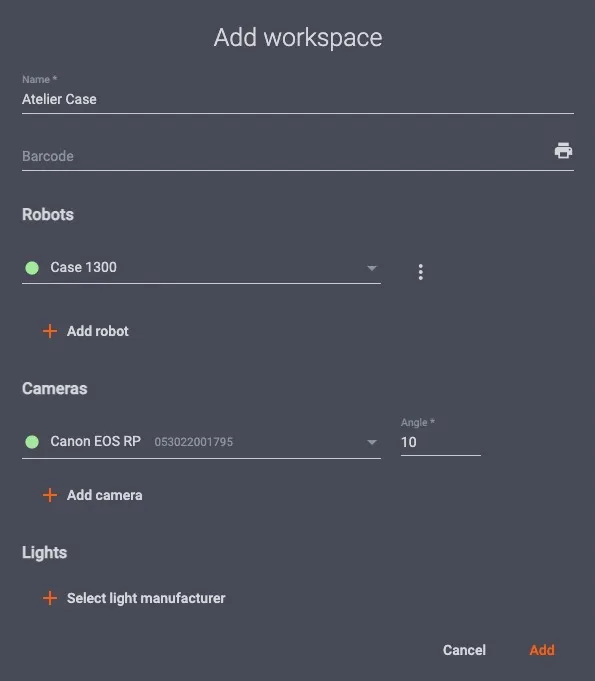
Pärast CAPP avamist on tavaliselt esimene asi, mida kasutaja teeb, luua tööruum. Tööruum on riistvara loend, mida kasutatakse konkreetse fotosessiooni jaoks. See võib sisaldada erinevaid PhotoRobot mooduleid, kaameraid, tulesid ja muid tarvikuid.
Demo eesmärkidel saavad kasutajad töötada eelmääratletud näidistööruumiga, mis on konfigureeritud kasutama virtuaalset riistvara. Sel viisil saavad kasutajad endiselt katsetada CAPP erinevaid funktsioone, valides virtuaalsed robotid ja kaamerad.
Riistvara ühendamine
Tegeliku (erinevalt virtuaalsest) riistvara kasutamise alustamiseks veenduge esmalt, et riistvara on ühendatud samasse arvutivõrku (või alamvõrku) kui arvuti, mida kasutate oma PhotoRobot juhtimiseks.
Märkus: Alates PhotoRobot Controls versioonist 2.5.4 saab nüüd toetada iga kaamerat kolmanda osapoole kaamera integreerimise kaudu. Samal ajal on ühilduvate kaamerate hulka erinevaid Canon'i kaameramudeleid, meie soovitatud Wi-Fi toega Canon kaameraid ning ka iPhone'i kaameraid, kui kasutada PhotoRobot Touch rakendust.
Oluline: Automatiseeritud fotograafia jaoks robotilise tööjaama abil on PhotoRobot soovitanud peeglita Canon kaameramudelid kõige usaldusväärsemad. Kuigi on olemas tugi käeshoitavatele kaameratele Wi-Fi või kaabelühenduse kaudu, võib nende kasutamine tekitada probleeme. Nendeks on sagedased Wi-Fi katkestused (peamiselt ajapiirangu tõttu), kaablite pikkuse probleemid ja ühenduste riskid.
Kaamera ühendamiseks peab see olema ühendatud robotiga samasse kohalikku arvutivõrku ühel kolmest viisist:
- Otseühendus USB kaudu kohtvõrguga;
- Soovitatava pihukaamera ühendamine spetsiaalse Wi-Fi-protokolli kaudu (juurdepääsetav Canoni tööriistarakenduses Canoni arendaja lehel);
- Ühe või mitme iPhone'i integreerimine rakenduse PhotoRobot Touch kaudu. (Juhised iPhone'i kasutamise kohta koos PhotoRobot-ga leiate iPhone'i puuterakenduse kasutusjuhendist.)
Pärast riistvara (või kaamera) ühendamist tööruumiga saate seejärel kontrollida, kas see on võrgus (CAPP tuvastab selle). Selleks kontrollige antud seadme nime vasakul asuvat punkti. Kui seade on tuvastatud, on seal roheline punkt.
Hall täpp seadme nime kõrval näitab, et riistvara ei ole tuvastatud või pole sisse lülitatud. Kui on punane täpp, tekib viga, näiteks kui kasutaja ei lülita kaamerat käsitsi režiimi. Vea põhjuse tuvastamiseks vii hiir punase täpi kohale, et kuvada tööriistavihje koos vea kirjeldusega.
Täieliku samm-sammulise juhendi riistvara ühendamisest tööruumi seadistamiseks leiate jaotisest "PhotoRobot tööruumi seadistamine".
Probleemide korral vaadake lehte PhotoRobot Tõrkeotsing levinud probleemide ja nende lahenduste kohta.
Robotikäe kõrguse seadistamine
Kui kasutate tööruumis robotkätt, pange tähele, et tõenäoliselt on vaja täiendavat seadistamist. Seda seetõttu, et robotkäsi on iseseisev masin ja selle CAPP-i kaudu juhtimise üks funktsioone on see, et kõrguse liikumine joondab pöörlemistelje pildistatud objekti kõrguse keskpunktiga.
Robotkäe pöörlemistelje kõrguse määrab töökoha masina tüüp ja samal ajal nivelleerimisjalgade reguleerimine, mis kompenseerivad põranda ebatasasusi. Kui kõik on õigesti seadistatud, on masin tasane ja pöörlemiskeskus on kindlal kõrgusel põranda kohal. Kuid kogukõrgus sõltub ka plaadimängija pinna kõrgusest, mis on erinevate robotite vahel erinev. See tähendab, et kõrguse viites võib olla lahknevusi, kuna robotkäe veeru all on kõrguseadapter, nii et see joondub ligikaudu.
Täiusliku joondamise tagamiseks on seejärel vaja sisestada käe ja plaadimängija kõrguste CAPP-i. Kõrguste mõõdab täpset kaugust robotkäe pöörlemistelje ja pöördlaua pinna asetuse kõrguse vahel (kaasa arvatud kõik selle peale asetatud lisaplaadid). See annab täpsed mõõtmed, millest süsteem arvutab poole objekti kõrgusest, ja asukoha, kus käsi peaks liikuma. Samuti tagab see, et süsteem on seadistatud automaatselt ja õigesti töötama.
Pange tähele ka: Süsteem on seatud lükkama tagasi väärtused, mis jäävad antud seadistuse jaoks väljapoole kehtivat vahemikku.
Sea robotkäe lift nulltasemele
Robot ARM-i lifti nulltasemele seadmiseks avage esmalt CAPP-i kohalik versioon ja avage Workspace'i seaded ühel kahest viisist:
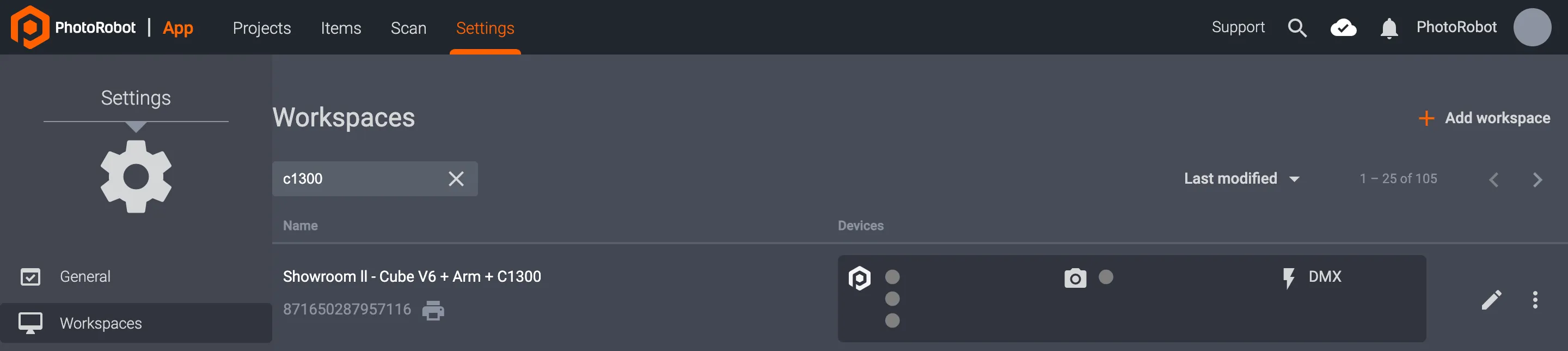
1. Avage CAPP-i kohalik versioon, klõpsake liidese ülaosas nuppu Seaded ja valige vasakpoolse menüü valikutest tööruumid . Leidke selles menüüs töötav tööruum ja klõpsake tööruumi pealkirja kõrval olevat redigeerimisikooni, et avada tööruumi sätete redigeerimine:
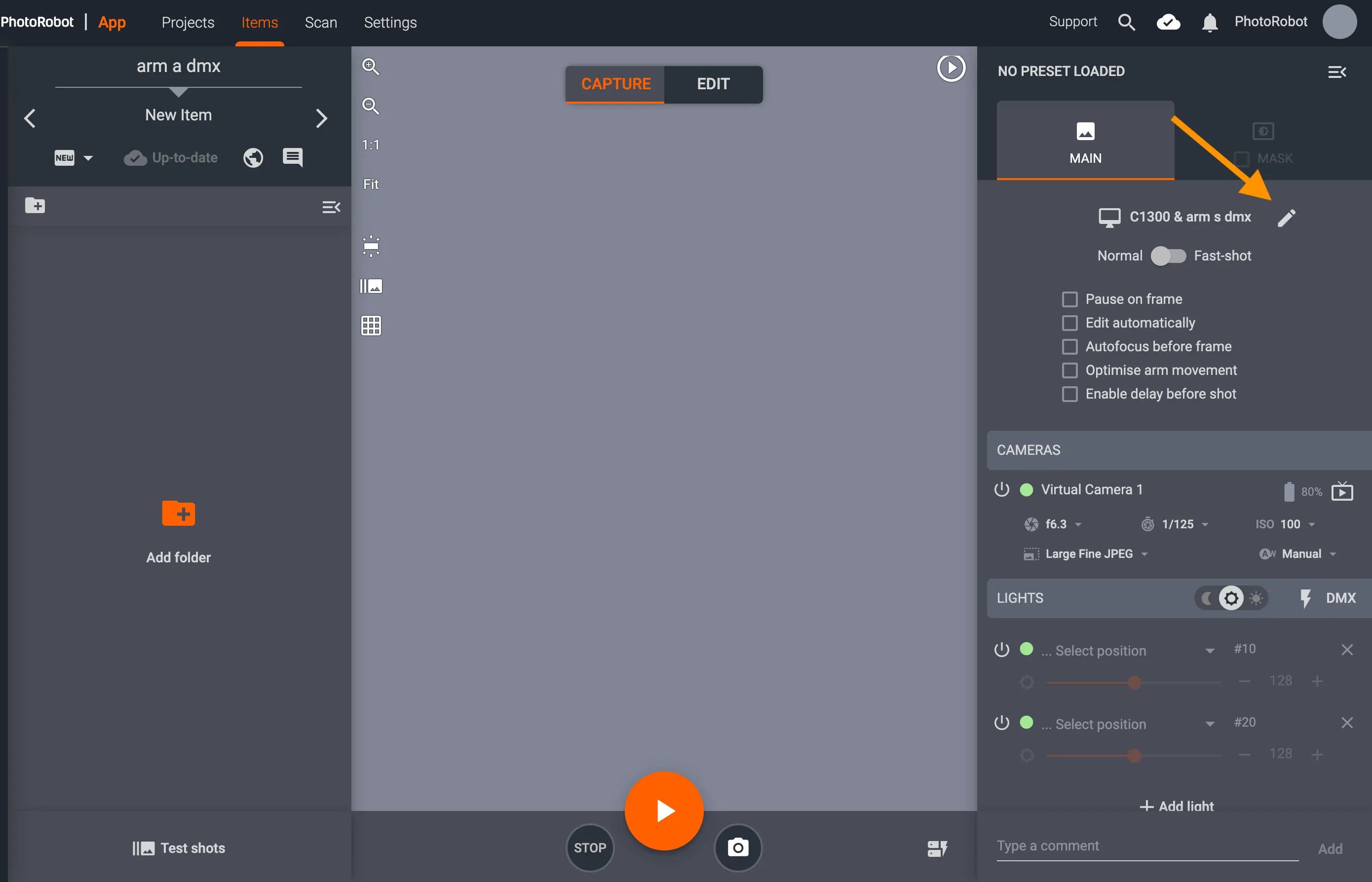
2. Teise võimalusena on võimalik pääseda juurde menüüle Redigeeri tööruumi, avades CAPP-i kohalikus versioonis üksuse hõivamisrežiimis ja klõpsates seejärel liidese paremal küljel tööruumi pealkirja kõrval olevat redigeerimisikooni:
Kumbki meetod avab tööruumi sätete redigeerimise. Seejärel leidke robotkäe konfigureerimiseks seade menüüst Robotid ja klõpsake 3 vertikaalset punkti Robot Armi nime kõrval.
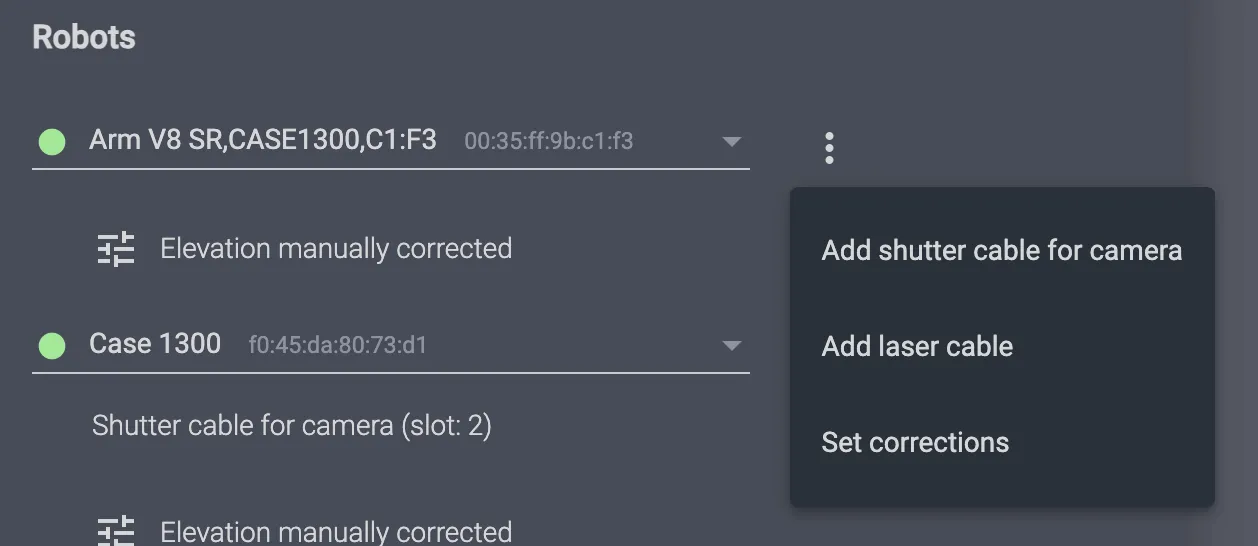
Järgmisena valige menüüvalik Määra parandused , et avada lifti korrigeerimise seadmise funktsioon:
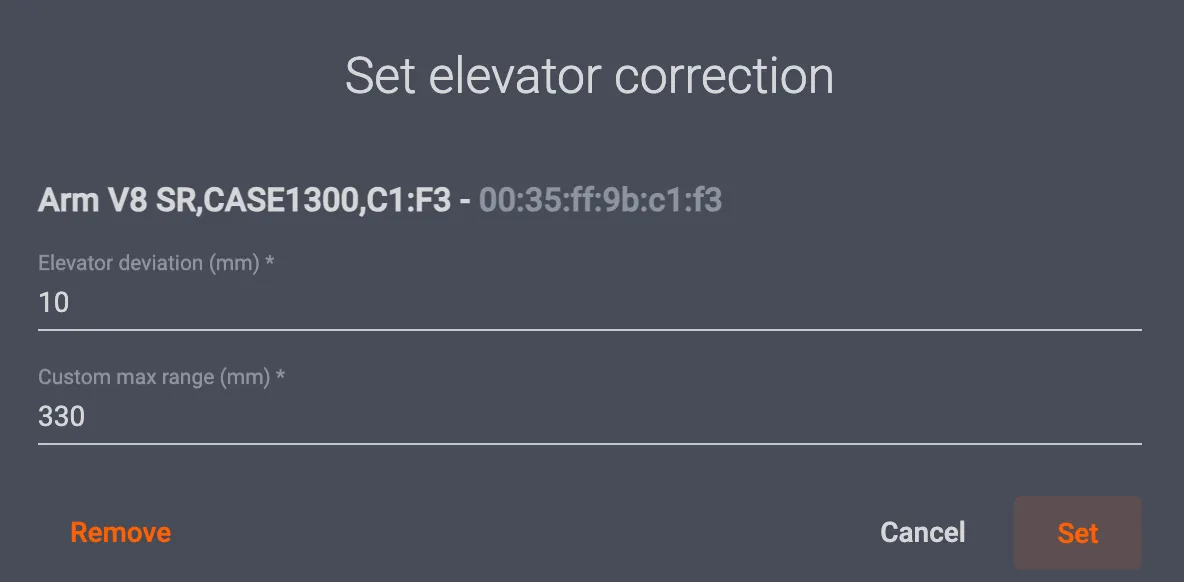
Reguleerige menüüs Määra lifti korrigeerimine ülemisel väljal olevat numbrit Lifti kõrvalekalle (mm), et seada kaamera kõrgus sobivale nulltasemele. Näiteks kui kaamera on keskelt väljas 10 mm laua kohal, seadke kaamera tsentreerimiseks lifti kõrvalekalle väärtuseks -10 mm.
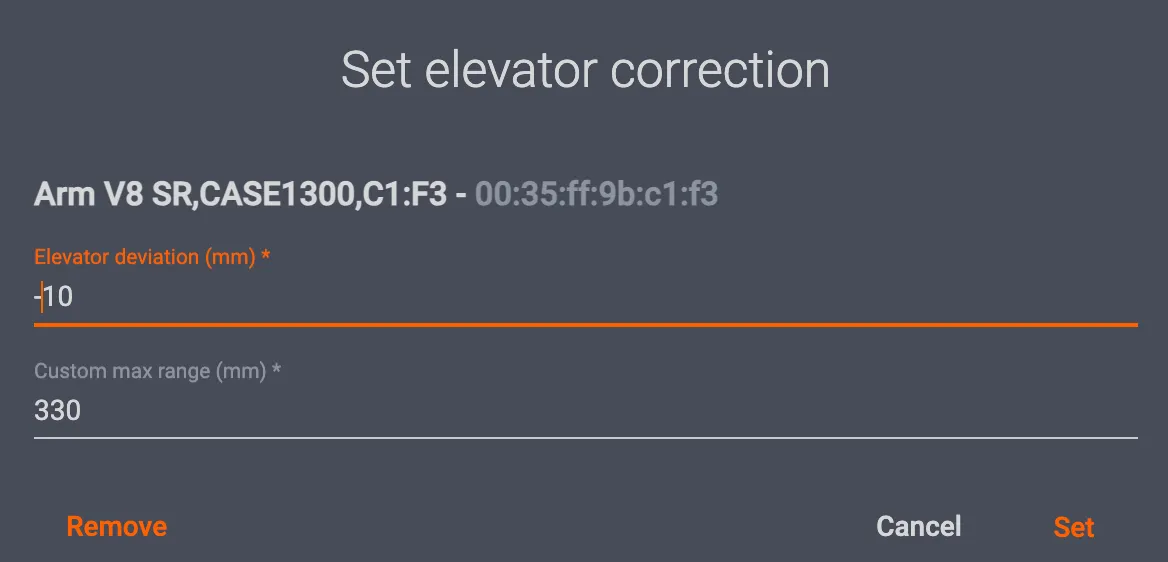
Kui kaamera on laua all 10 mm keskelt väljas, seadke lifti kõrvalekalle väärtuseks +10 mm. See joondab robotkäele paigaldatud kaamera kõrguse õigesti tarkvaras sobivale nulltasemele.
Märkus: Tõstuk võib ulatuda maksimaalselt 330 mm-ni. Seega, kui nulltaset reguleeritakse +30 mm võrra, võib maksimaalne tõstmine ulatuda ainult 300 mm-ni. See tähendab, et süsteem suudab jäädvustada ainult tooteid, mis on selle varu võrra väiksemad, 30 mm või vähem.
Failide haldamine – projektid, üksused ja kaustad
CAPP-s on pildid jagatud projektidesse, üksustesse ja kaustadesse.
- Projekt on kõrgeima taseme andmeolem. Tavaliselt sisaldab projekt üksusi ühest fotosessioonist või võib-olla ühest võttepäevast/nädalast.
- Projektid koosnevad ühest või mitmest üksusest. Üks üksus on tavaliselt konkreetne pildistatud objekt.
- Üksus sisaldab ühte või mitut kausta. CAPP-s võib ühes üksuses olla mitu kausta, et hoida erinevat tüüpi pilte eraldi. Väga levinud näide on üks kaust 360° pöörleva esitluse jaoks (nn "spin"), kasutades samal ajal teist piltide ("fotod") salvestamiseks.
Pildistamise alustamiseks peate kõigepealt lisama uue projekti (kui teil pole juba seda, mida soovite kasutada), samuti vähemalt ühte üksust.
( ! ) - Kui teil tekib probleeme, leidke PhotoRobot tõrkeotsingu käsiraamatust täiendav tugi kaamerate, robotite, tulede ühendamiseks ja redigeerimiseks.
Üldised seaded - pilve automaatne varundamine, töötlemine, puutetundlik rakendus
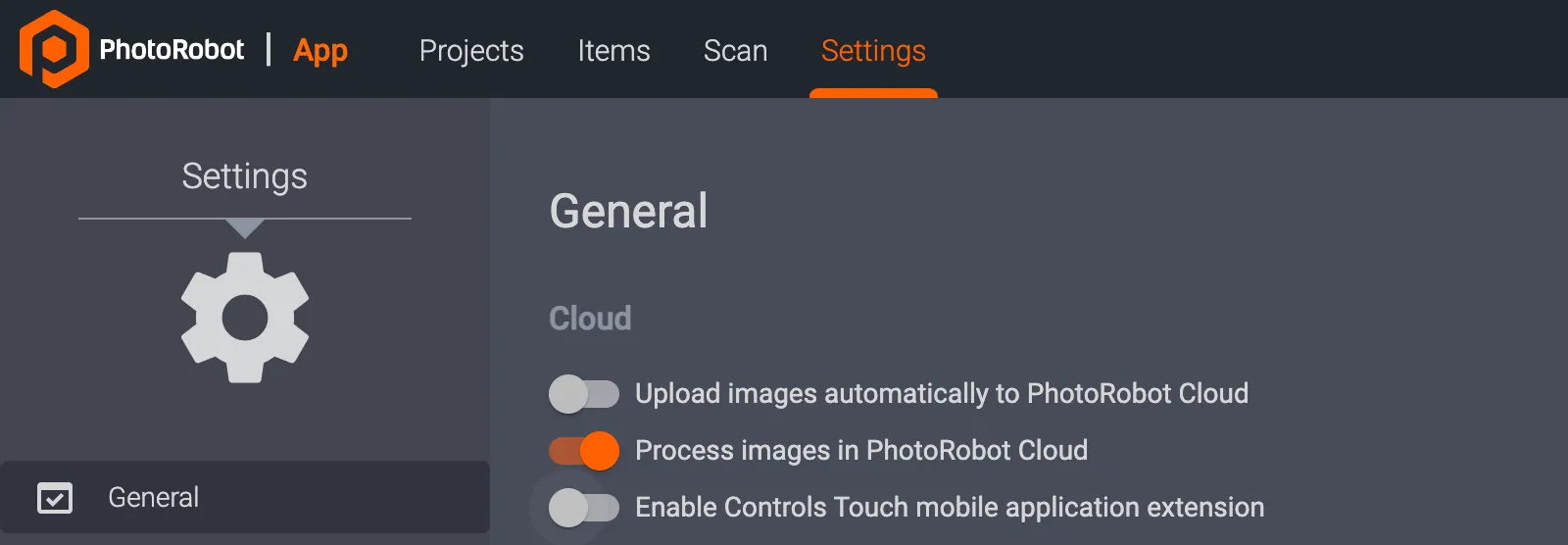
CAPP-i kohalikus töölauaversioonis on sisse- või väljalülitamiseks 3 üldist sätet:
- Laadige pildid automaatselt PhotoRobot pilve
- Piltide töötlemine PhotoRobot pilves
- Luba juhtelemendid Puudutage mobiilirakenduse laiendit
Vaikimisi seatakse kohalik rakendus piltide automaatsele üleslaadimisele PhotoRobot pilve. See funktsioon salvestab jäädvustatud piltide varukoopia automaatselt teie pilveserverisse hilisemaks eksportimiseks.
Piltide automaatse PhotoRobot pilve üleslaadimise keelamiseks lülitage CAPP-i üldsätete kohalikus versioonis suvand välja. Selle asemel salvestatakse jäädvustatud üksused teie kohalikku rakendusse või teie enda pilvekontole.
Lülituste abil saate lubada või keelata ka funktsiooni Töötle pilte PhotoRobot pilves. Kui see funktsioon on sisse lülitatud, järeltöötleb see funktsioon pärast jäädvustamist automaatselt pilte vastavalt PhotoRobot pilve eelseadetele.
Kui kasutate iPhone'ile mõeldud mobiilirakendust PhotoRobot Touch, lülitage sisse Luba juhtelemendid Puutetundliku mobiilirakenduse laiend.
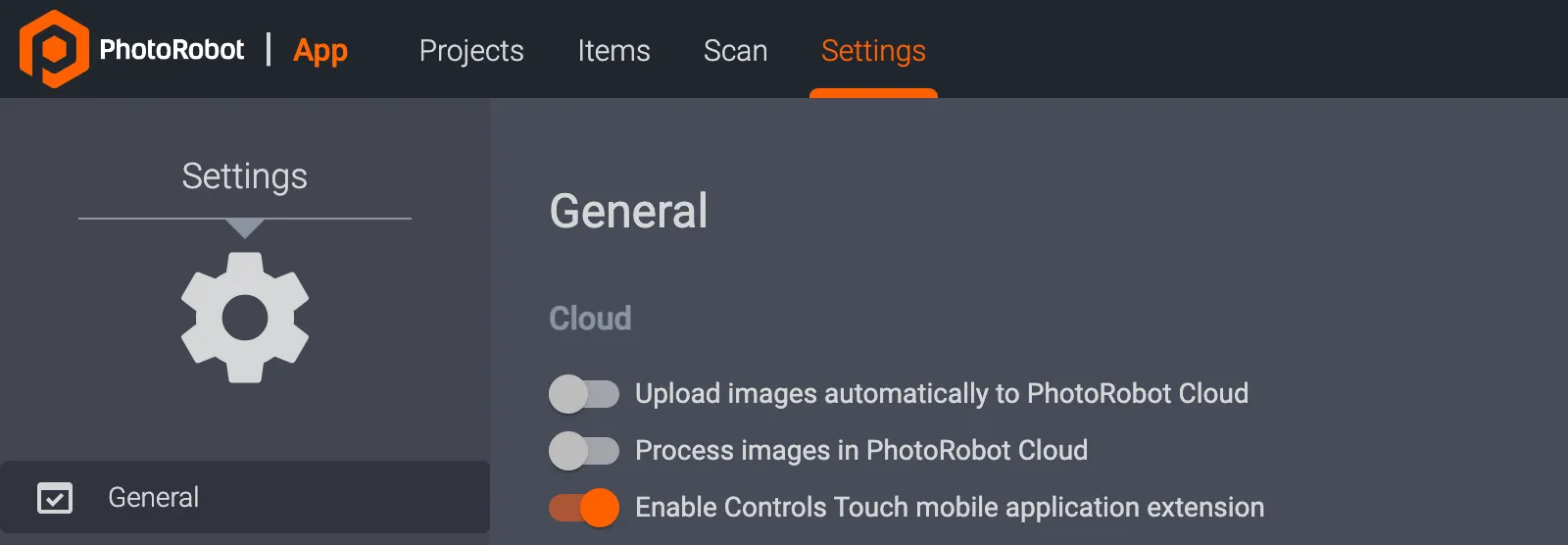
Märkus: PhotoRobot Touchi installimise ja kasutamise tehnilised juhised leiate iPhone'i PhotoRobot Touchi rakenduse kasutusjuhendist.
Üldsätted – uue üksuse automaatne loomine
Lisaks on CAPP-i kohaliku töölauaversiooni üldseadetes vöötkoodiskanneri seaded, mis võimaldavad vöötkoodilugeja täpsemaid valikuid konfigureerida. Kasutage valikust Loo süsteemis automaatselt uus üksus tundmatu vöötkoodi skannimisel vasakul asuvat lülitit, et lubada või keelata üksuse automaatne loomine.
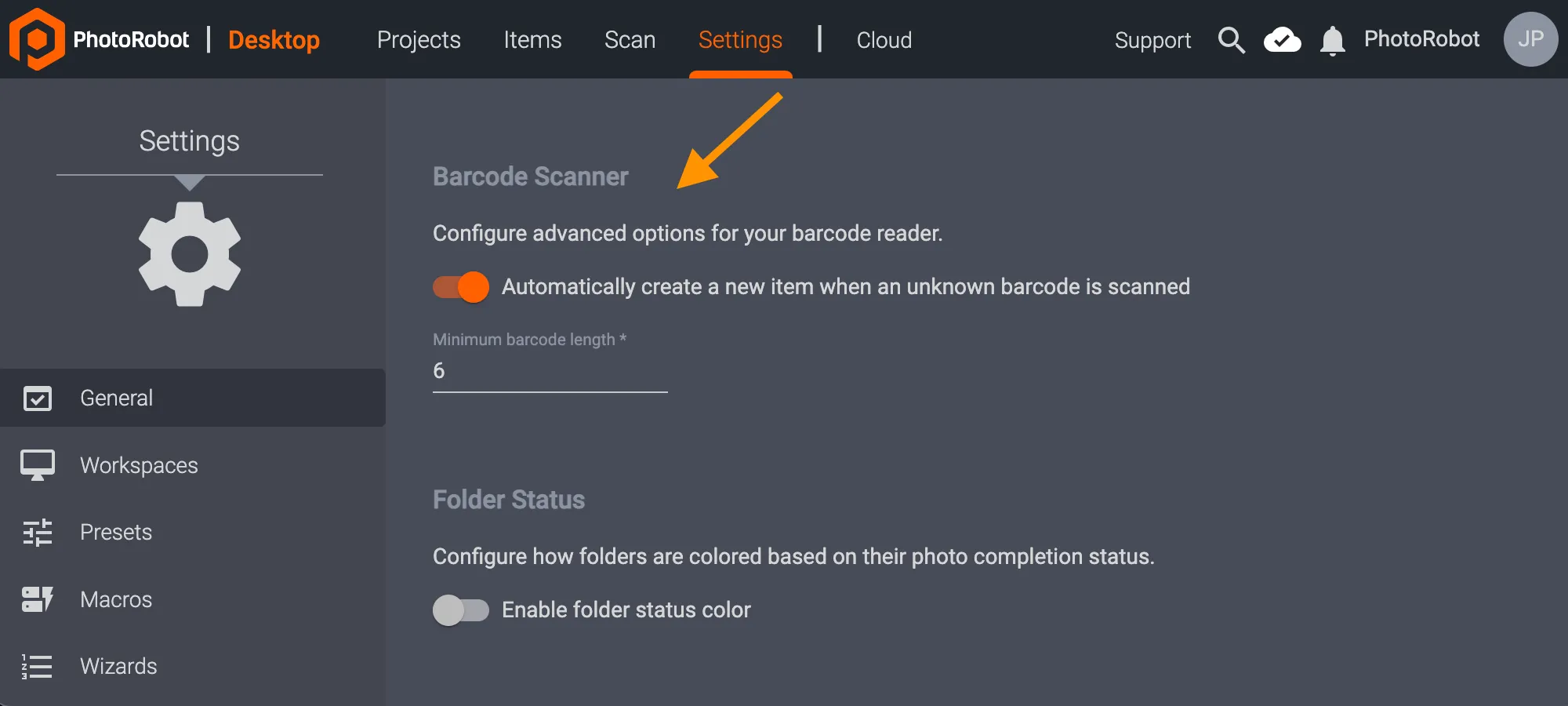
Kui see on aktiivne, toimib seade alternatiivina üksuse käsitsi loomisele. See võimaldab tuvastada eseme püüdmise kohas (tavaliselt vöötkoodi või QR-koodi abil). Operaator lihtsalt skannib tundmatu koodi ja projektis luuakse automaatselt uus üksus. Üksuse nimetamine toimub vastavalt skannitud stringile ja üksuse identifikaatori väljale. Seejärel pildistab operaator üksuse.
Nii ei ole vaja stuudiotarkvaras inventuuriga seotud toiminguid teha. Näiteks piisab uue üksuse skannimisest ja seejärel fotograafia eelseadistatud (riiuli) koodi skannimisest (nt valgete, tumedate või värviliste esemete puhul). Seejärel edastab süsteem automaatselt ja kohe täieliku fotode komplekti, järeltöötleb neid täielikult ja levitab need automaatse nimetamisega sihtsüsteemi.
Lisaks on alates CAPP-i versioonist 2.13.beta58 nüüd võimalus konfigureerida vöötkoodide minimaalne stringi pikkus. Varem oli vöötkoodi / QR-koodi minimaalne pikkus 6 tähemärki (et vältida muu hulgas skannitud stringi topelttõlgendust). Nüüd saab sätet Minimaalne vöötkoodi pikkus reguleerida, et võimaldada näiteks neljakohalistel identifikaatoritel töötada ilma täiendavate muudatusteta.
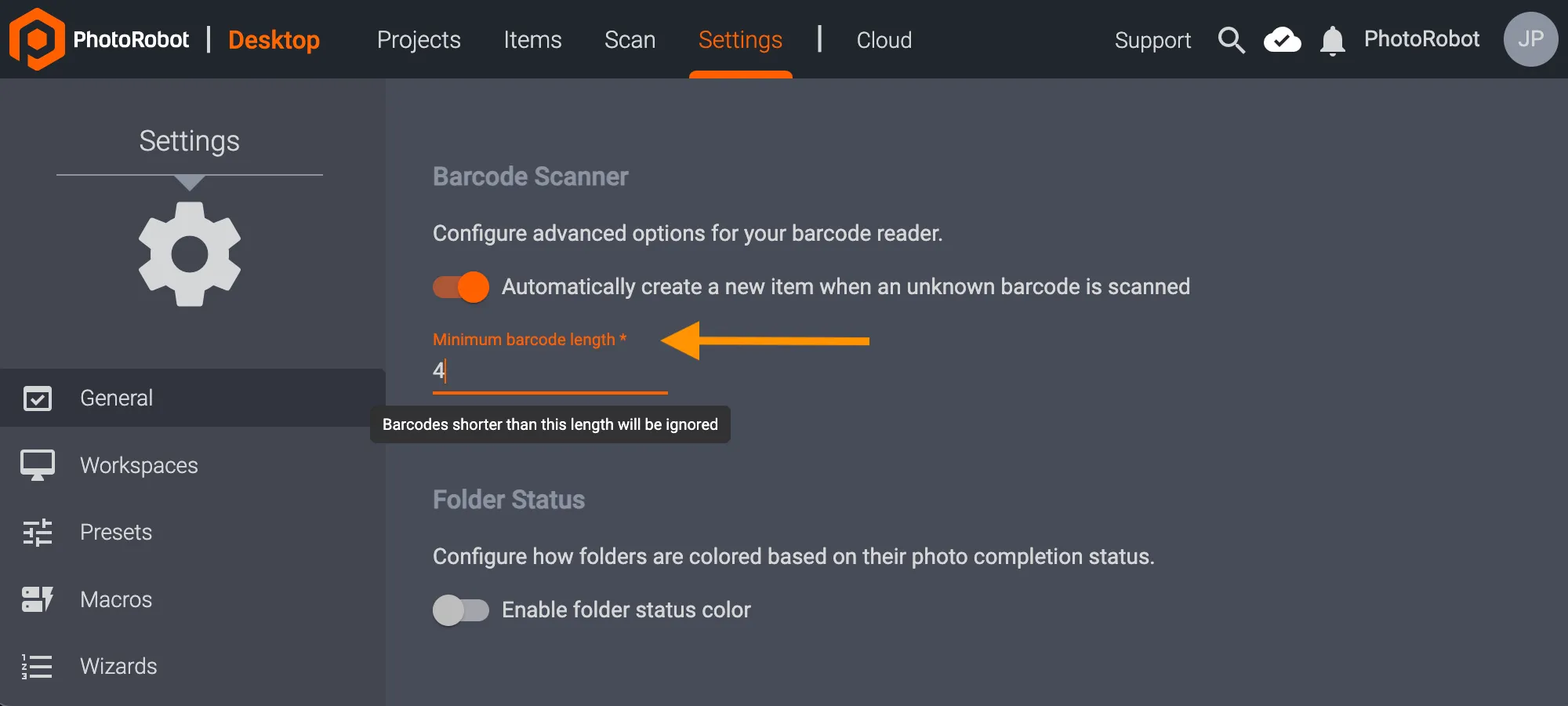
Vöötkoodide / QR-koodide minimaalse stringi pikkuse reguleerimiseks konfigureerige minimaalne vöötkoodi pikkus ka CAPP-i kohalikus versioonis jaotises Üldseaded - vöötkoodiskanner. Seejärel ignoreerib süsteem sisestatud pikkusest lühemaid vöötkoode.
Märkus: Pärast seda, kui üksusele on süsteemis vöötkood määratud, on vöötkoodile juurdepääs ka otse hõivamisrežiimi liideses üksuse teabealal vöötkoodinupu kaudu.
Projektiandmetele välise juurdepääsu andmine kliendile
Selleks, et töötada klientidega väljaspool tasulise CAPP-konto organisatsiooni, saab konto administraator luua kliendikontosid tasuta. Kliendikontod võimaldavad välisel kliendil vaadata projekti andmeid, osaleda kvaliteedi tagamises ülevaatuse ja kommentaaride kaudu ning pääseda alla laadimiseks ligi projekti varadele. See funktsioon on mõeldud olukordades, kus fotostuudio töötab välise kliendiga, kes vajab juurdepääsu konkreetsetele töödele.
Projekti jagamiseks kliendiga väljaspool oma organisatsiooni veenduge esmalt, et logite CAPP-i pilveversiooni sisse administraatoriõigustega kasutajaprofiili abil.
1. Logige pilvepõhisesse rakendusse sisse, kasutades administraatoriõigusega tasulist CAPP-konto profiili, ja klõpsake armatuurlaua paremas ülanurgas kasutajaprofiili menüüikoonil. Seejärel klõpsake halduspaneelile pääsemiseks nuppu Organisatsioon .
2. Järgmisena klõpsake paneelil Organisatsiooni haldus kasutajaliidese ülaosas asuvatest kontovalikutest Kasutajad .

3. Klõpsake nuppu Kliendid , et luua uus kasutajavalik, et pääseda juurde klientide lisamise funktsioonile konto liidese kaudu. Nupp + Lisa kliente kuvatakse armatuurlaua paremas ülanurgas kasutajaprofiili ikooni all.
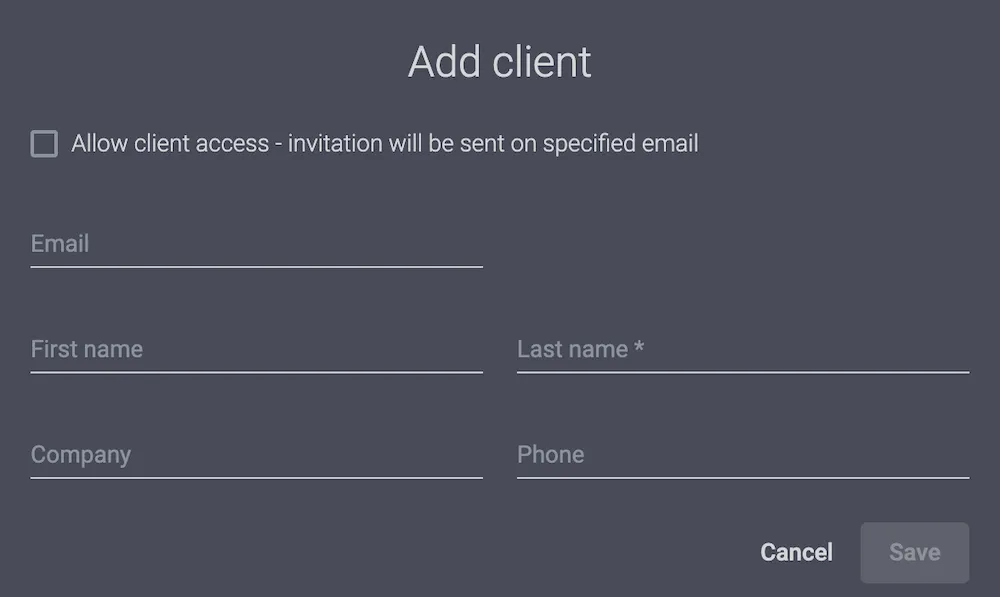
4. Klõpsake kasutajaprofiili ikooni all nuppu + Lisa klient .
5. Täitke kliendi andmete väljad (e-post, nimi, ettevõte, telefon) ja märkige ruut Luba kliendile ligipääs. Vaadake teabe täpsus üle ja klõpsake nuppu Salvesta , et lisada klient CAPP-i.
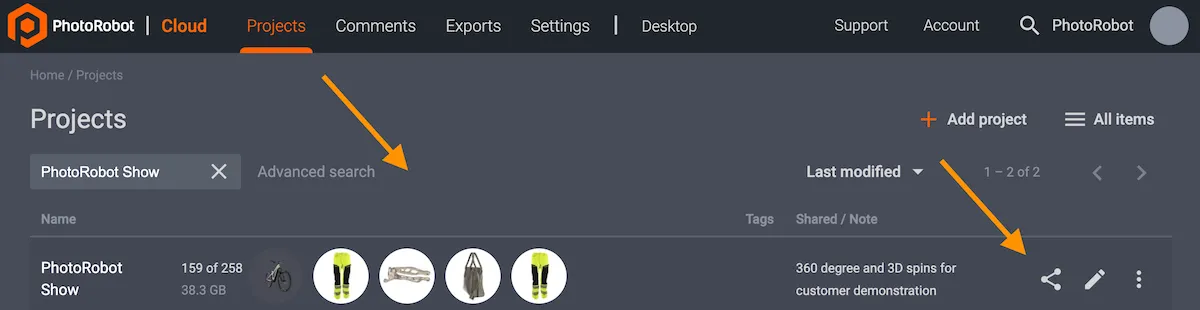
6. Avage CAPP-i pilveversioonis projektid , leidke projekt, mida soovite salvestatud kliendiga jagada, hõljutage hiirekursorit projektiriba kohal ja klõpsake projekti üksikasjadest paremal asuvat jagamisikooni.
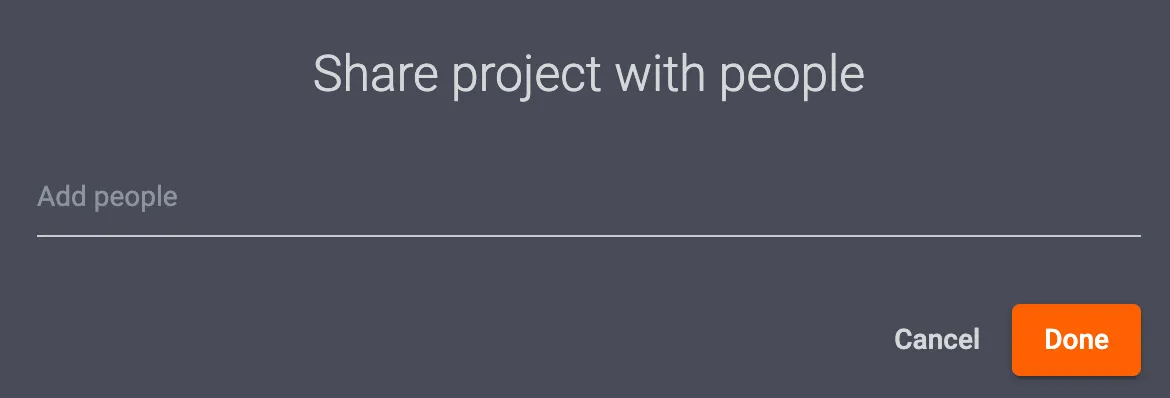
7. Klõpsake projektiriba paremas servas olevat jagamisikooni, et avada funktsioon Jaga projekti inimestega , valige salvestatud kliendid ja klõpsake nuppu valmis. Projekti jagatakse nüüd kliendiga, võimaldades tal vaadata tööd ja kommenteerida CAPP-is kvaliteedi tagamiseks ja vajadusel lisajuhiste saamiseks.
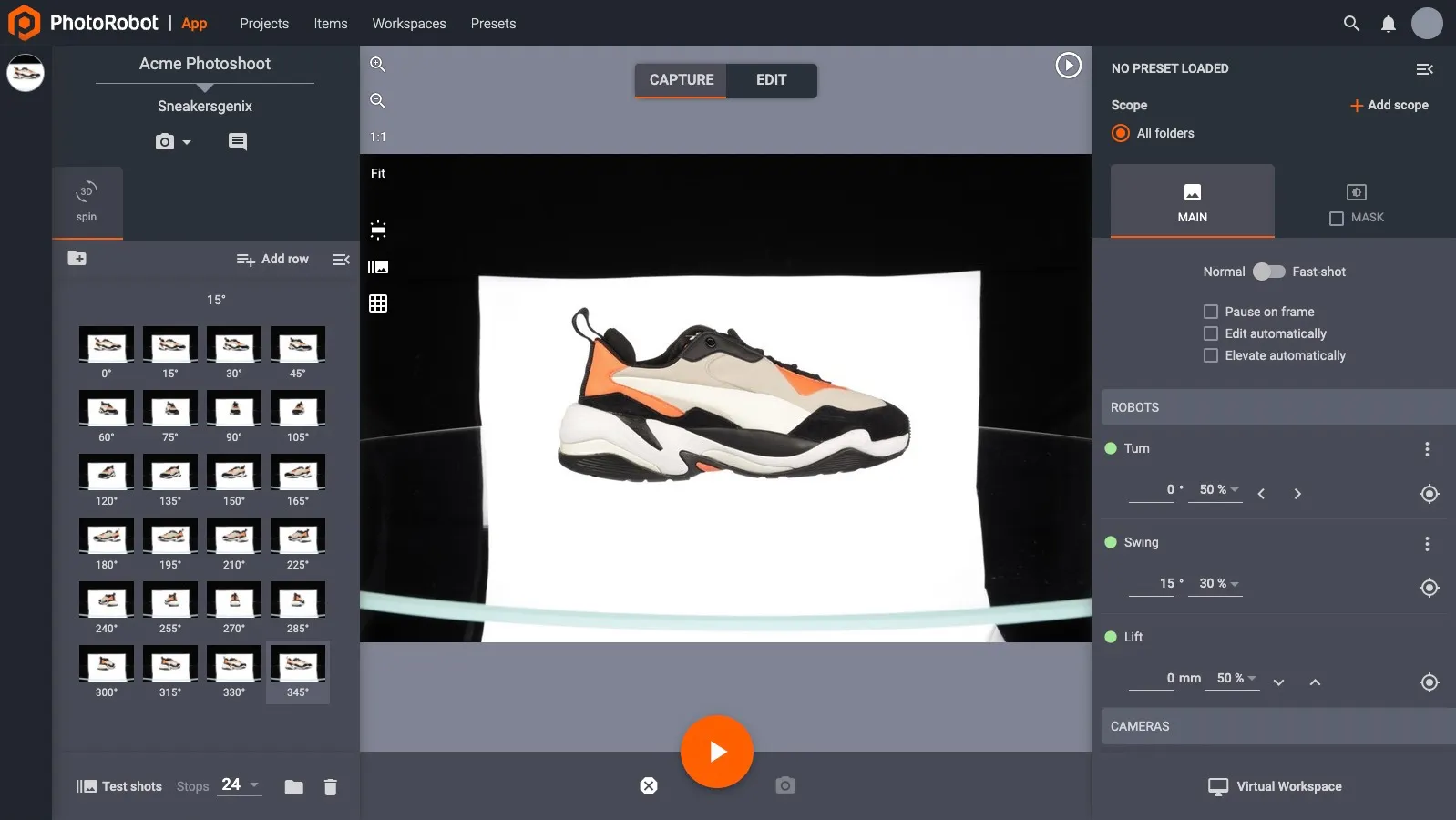
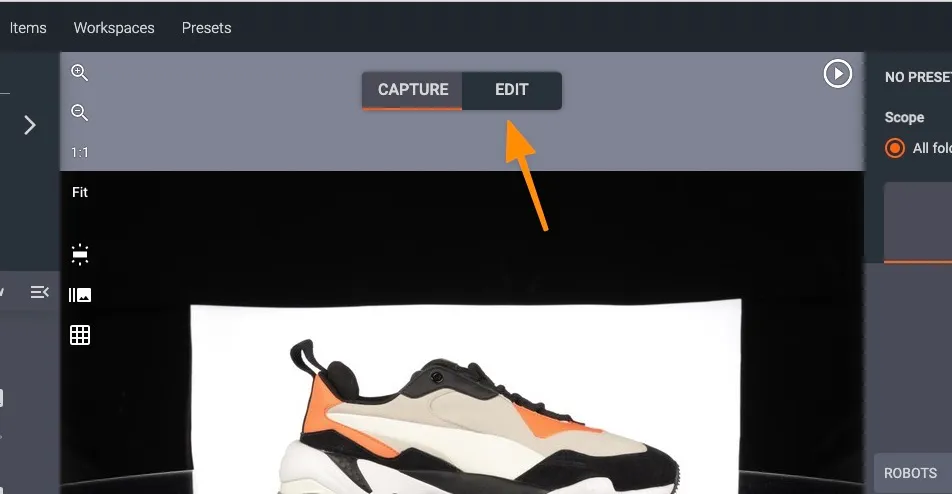
Püüdmisrežiimi liides
Pärast üksusele klõpsamist viiakse teid püüdmis-/redigeerimisliidesesse. Teile saadaolevad juhtelemendid muutuvad vastavalt sellele, kas tõmberežiim on aktiivne või redigeerimisrežiim . Hõiverežiimi kasutatakse fotograafia järjestuse juhtimiseks, samas kui redigeerimisrežiim kontrollib kogu CAPP-s tehtud järeltöötlust. Aktiivne režiim tõstetakse ekraani ülaosas esile:
Keerutuste, fotode või videokausta lisamine
Enne mis tahes fotosessiooni peate looma vähemalt ühe kausta. Peamised kaustatüübid on spinn (kasutatakse 360° esitluste jaoks), fotod (piltide jaoks) ja video (videote jaoks).
Keerutuste kausta loomine
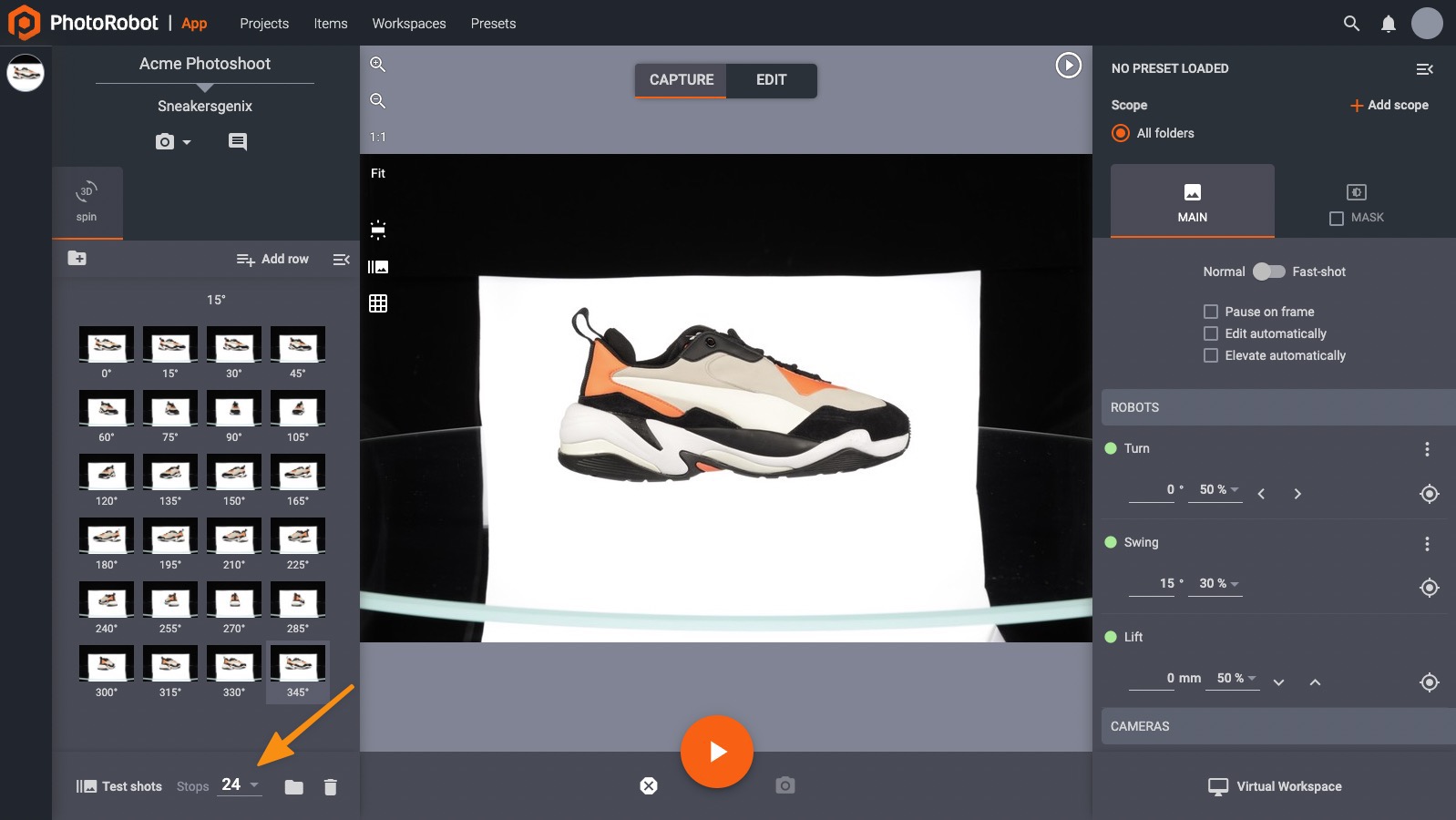
Keerutuskausta lisamisel lisab CAPP automaatselt peatusi (nimetatakse ka "raamideks") vastavalt sellele, mitu pilti keerutuse kohta valite. Vaikearv on 36 ja seda saab vasakus alanurgas muuta. Suurema peatuste arvu korral on pöörlemine sujuvam, kuid see võtab ka rohkem ruumi.
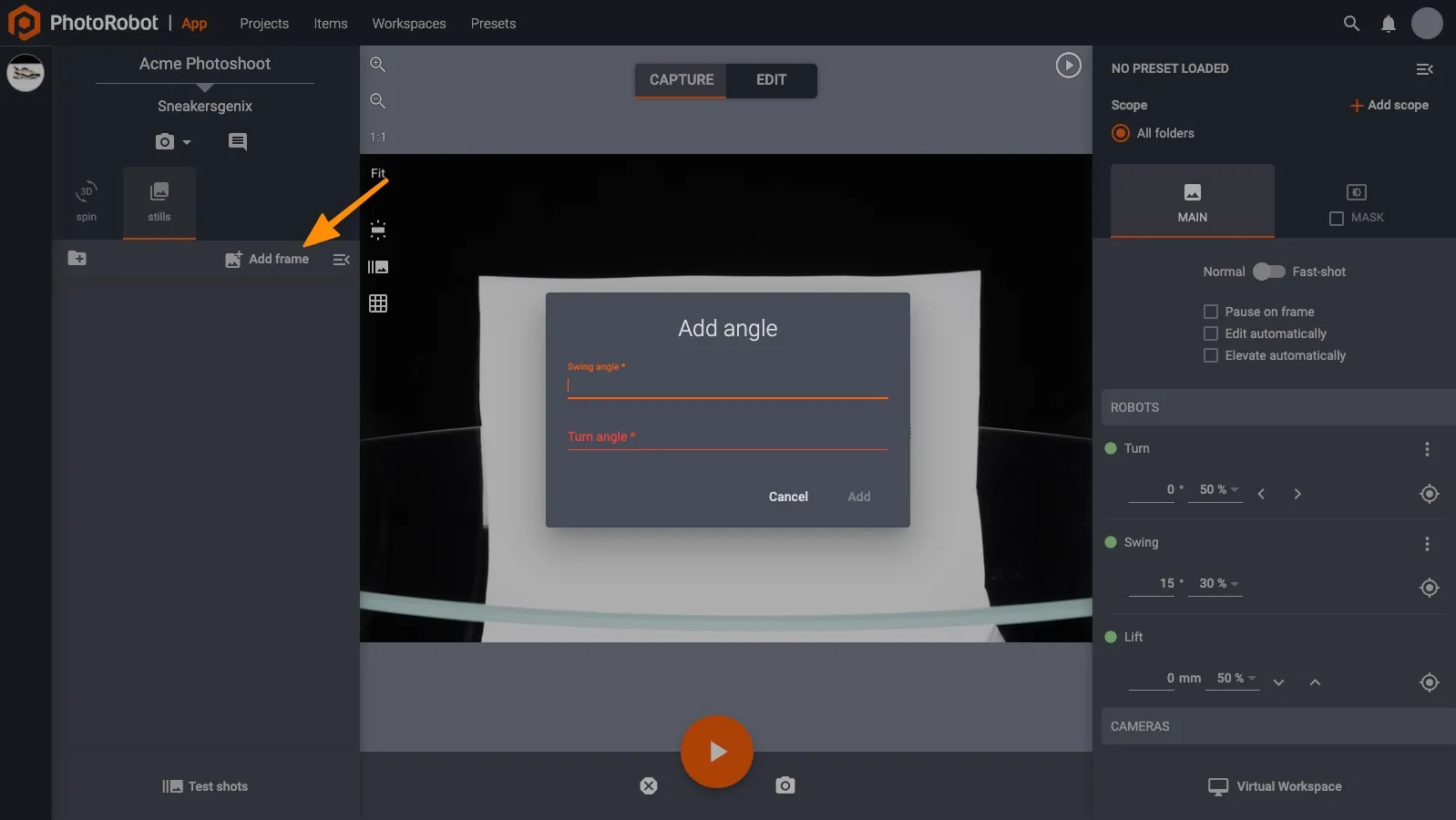
Fotode kausta loomine
Kui valite fotode kausta, peate oma peatused käsitsi lisama. See hõlmab pöördenurka (pöörlemisnurka) ja pöördenurka (kaamera vertikaalne asend mööda ringikujulist trajektoori). Pöördenurk on oluline, kui kasutate meie robotkäsi või mõnda muud moodulit, mis võib muuta kaamera horisontaalasendit.
Piltide importimine
Mõnel juhul võite soovida importida pilte CAPP-i uude või olemasolevasse kausta. Võtame näiteks käest hoidvate fotode, üksikasjalike kaadrite või muude mitmesuguste piltide importimise.
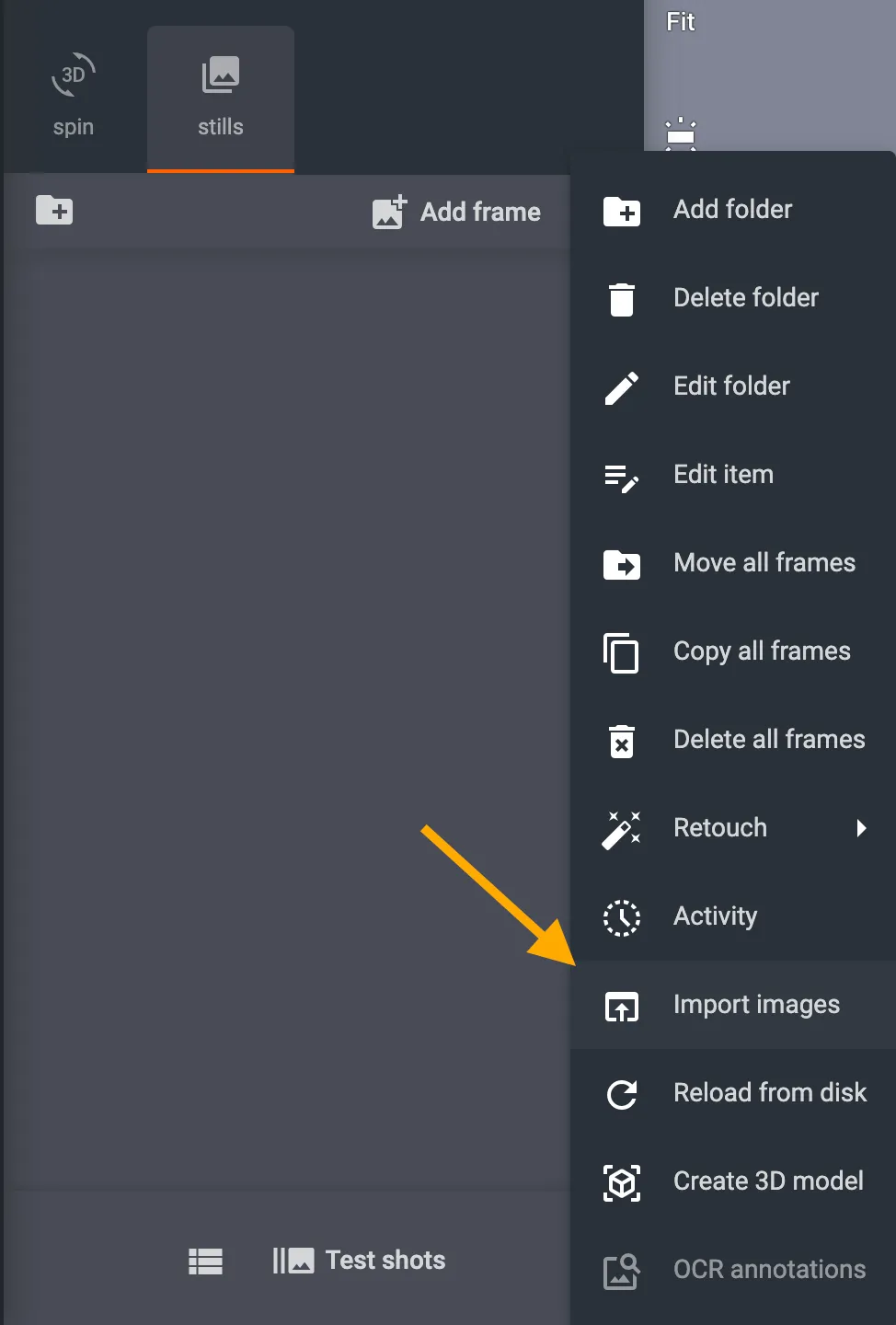
Piltide importimiseks CAPP-i avage esmalt CAPP-i jäädvustusrežiimi liideses uus või olemasolev üksus. Järgmisena klõpsake kaustade liidese paremas ülanurgas kaustatoimingute menüü ikooni.
Seejärel leidke kaustatoimingute menüü valikutest loendist ja klõpsake nuppu Impordi pildid .
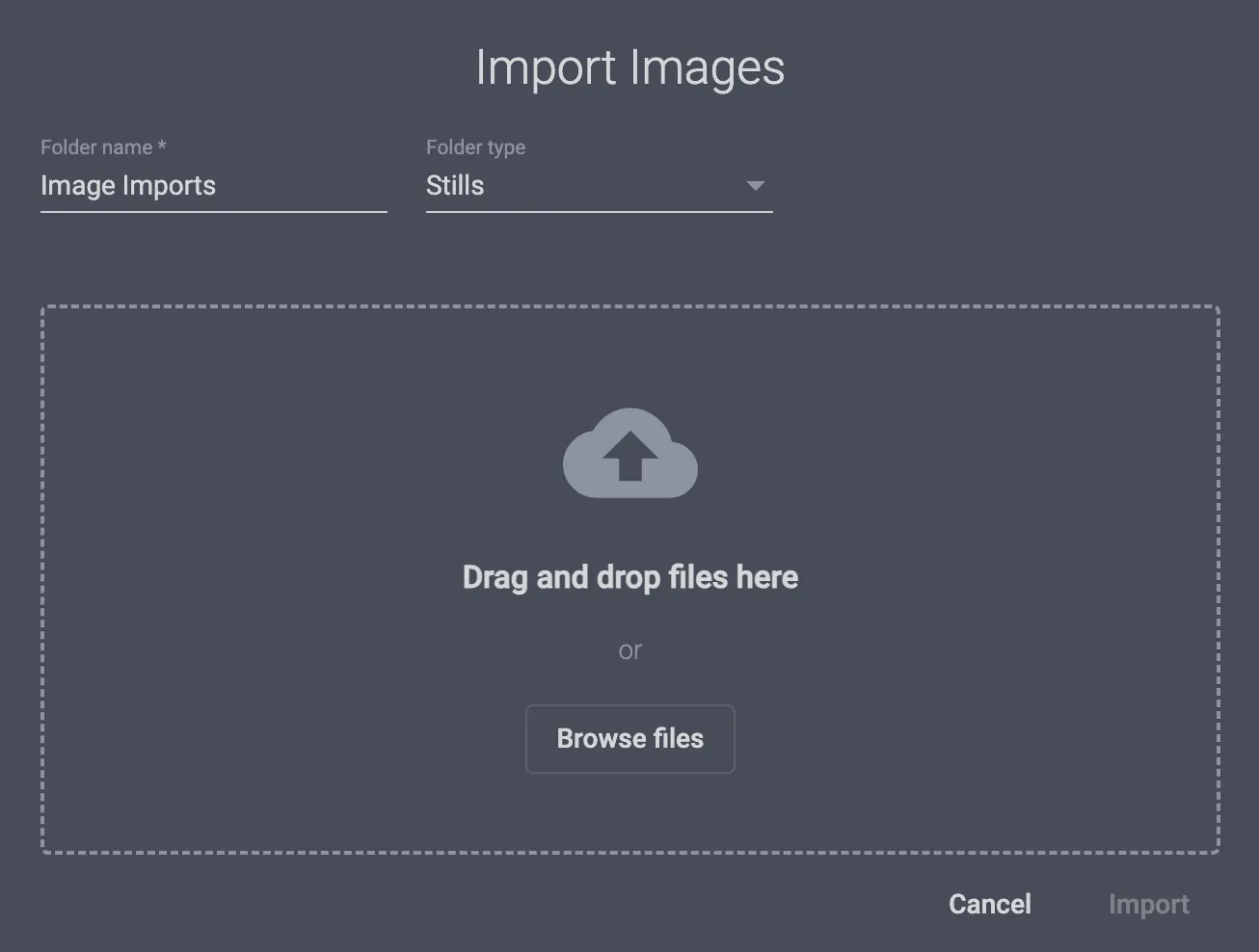
Klõpsates nuppu Impordi pildid, avaneb hüpikaken, mis võimaldab piltide importimist pukseerimise või kohalike failide sirvimise teel. Akna ülaosas on võimalik konfigureerida imporditud piltide jaoks ka kausta nimi ja kausta tüüp.
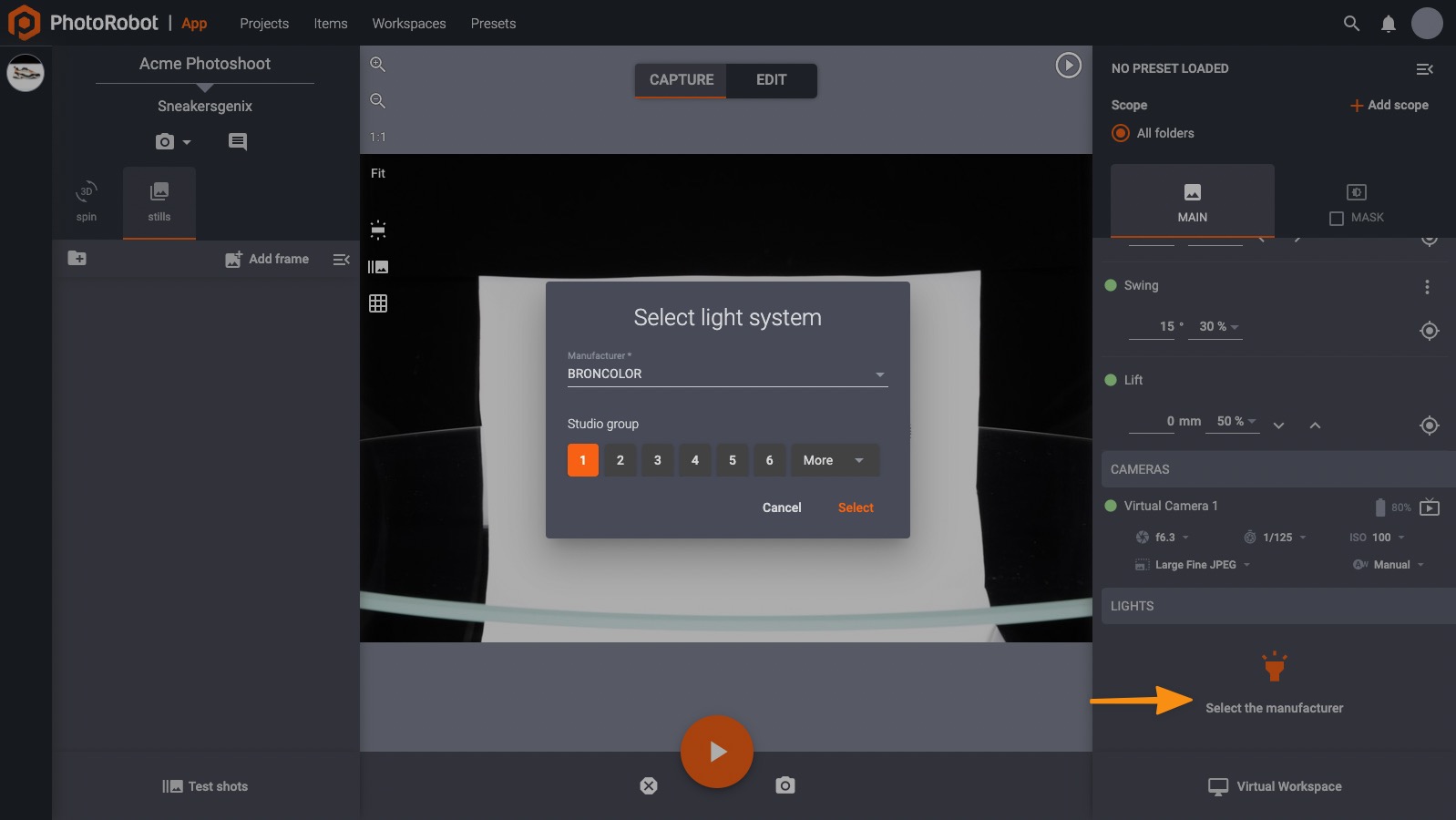
Ühilduvate tulede juhtimine
CAPP-ga ühilduvate tulede kasutamisel saate redigeerimisrežiimi akna paremas allnurgas valida tuled.
Püüdmisrežiimi liidese ülevaade
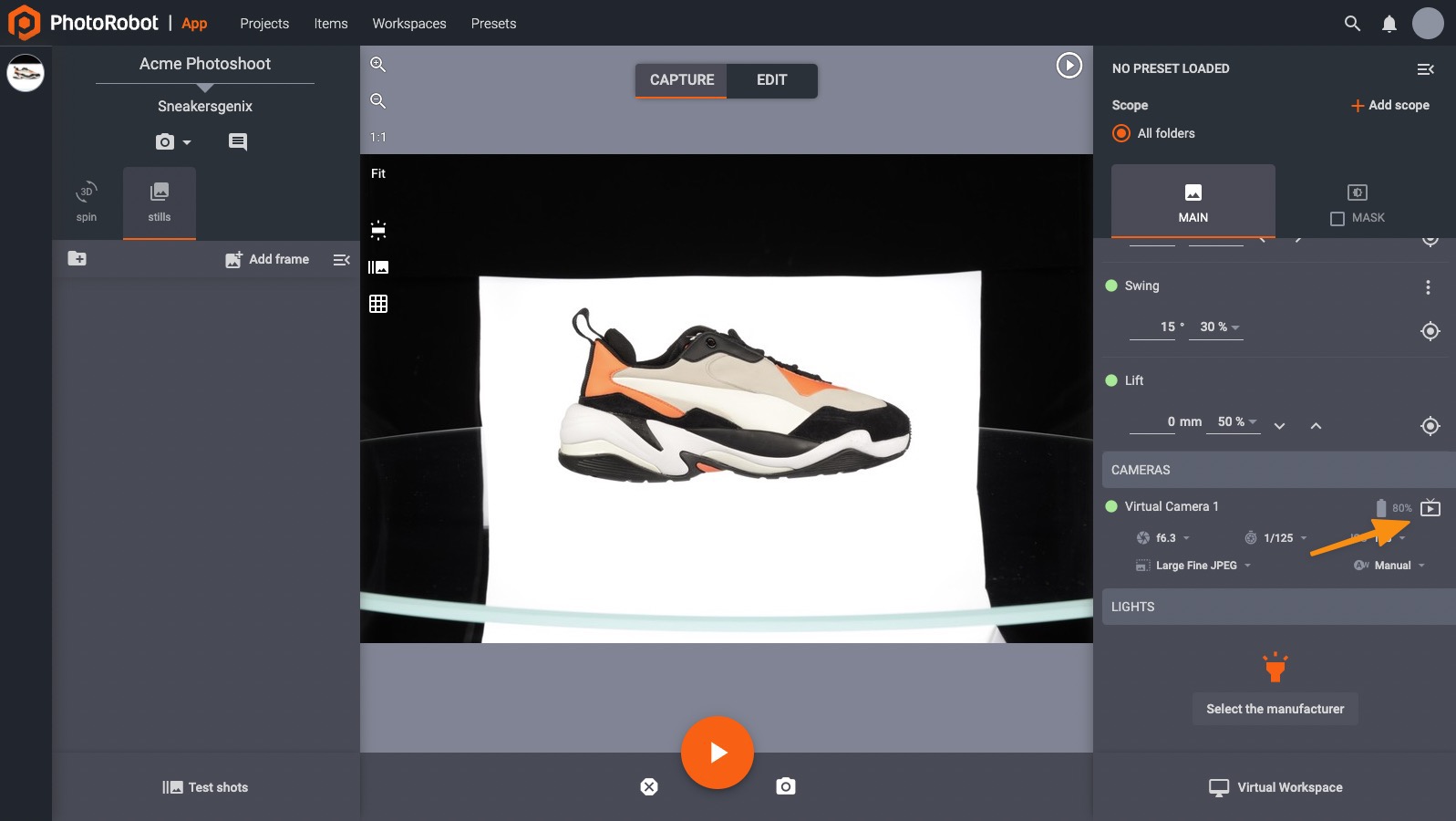
Hõiverežiimi liidese keskosas on eelvaateaken, mis kuvab kas praegu valitud pildi (kui olete seda juba teinud) või kaamerast voogesitatud otseülekannet.
Reaalaja vaadet, mis on kasulik, kui soovite kontrollida meelerahu ja fookust, saab lülitada kaamera juhtriba keskosas ekraani paremas servas asuva juhtriba keskosas.
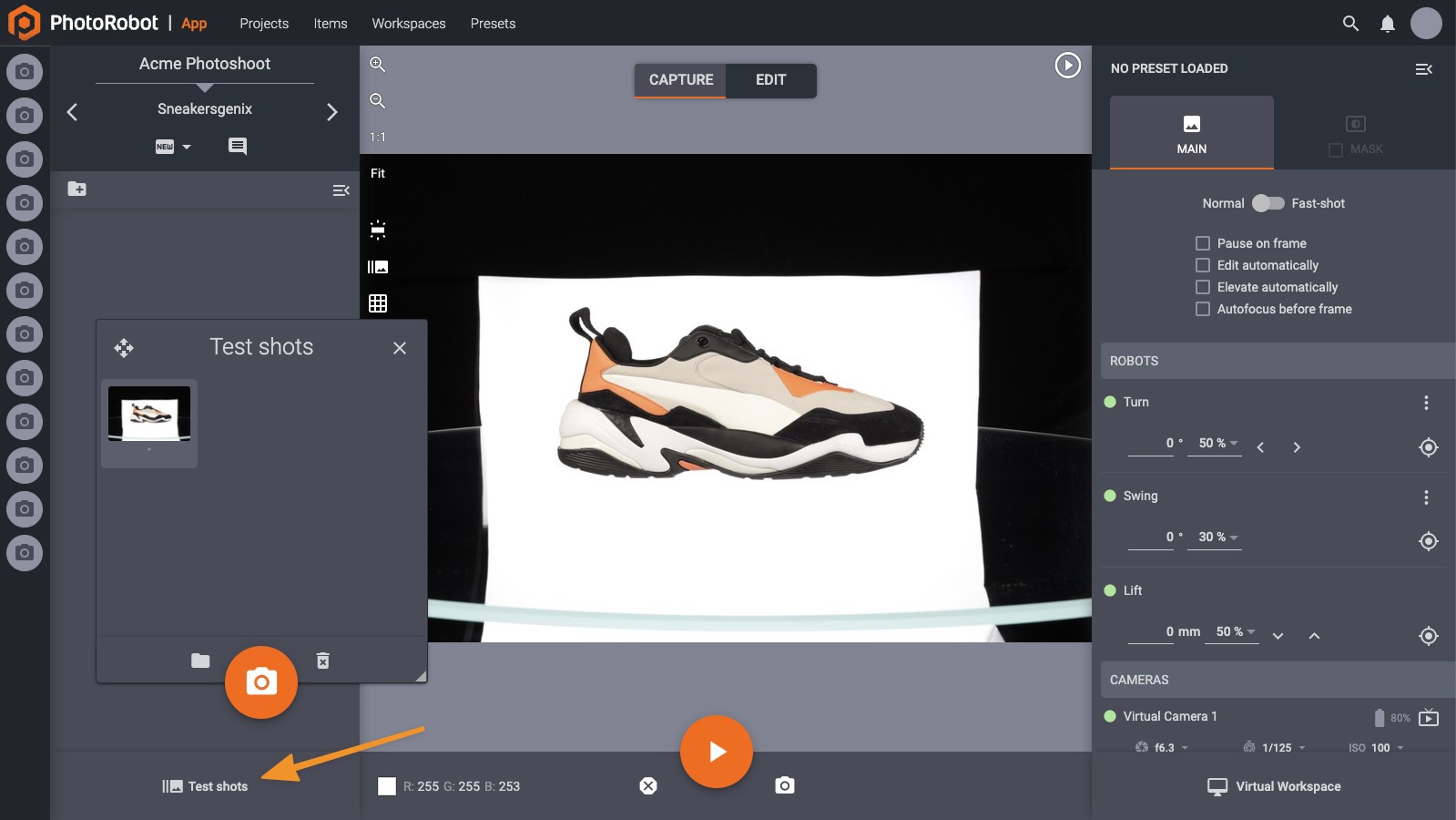
Testivõtete tegemine
Enne lõplike piltide tegemist on hea mõte teha üks või mitu katsepilti. Lihtsaim viis seda teha on vajutada arvuti klaviatuuril T-klahvi . See aitab teil kontrollida, kas peaksite muutma oma tulede, kaamera jne seadeid. Testpildid salvestatakse kausta "Test shot", millele pääsete juurde ekraani vasakus allosas.
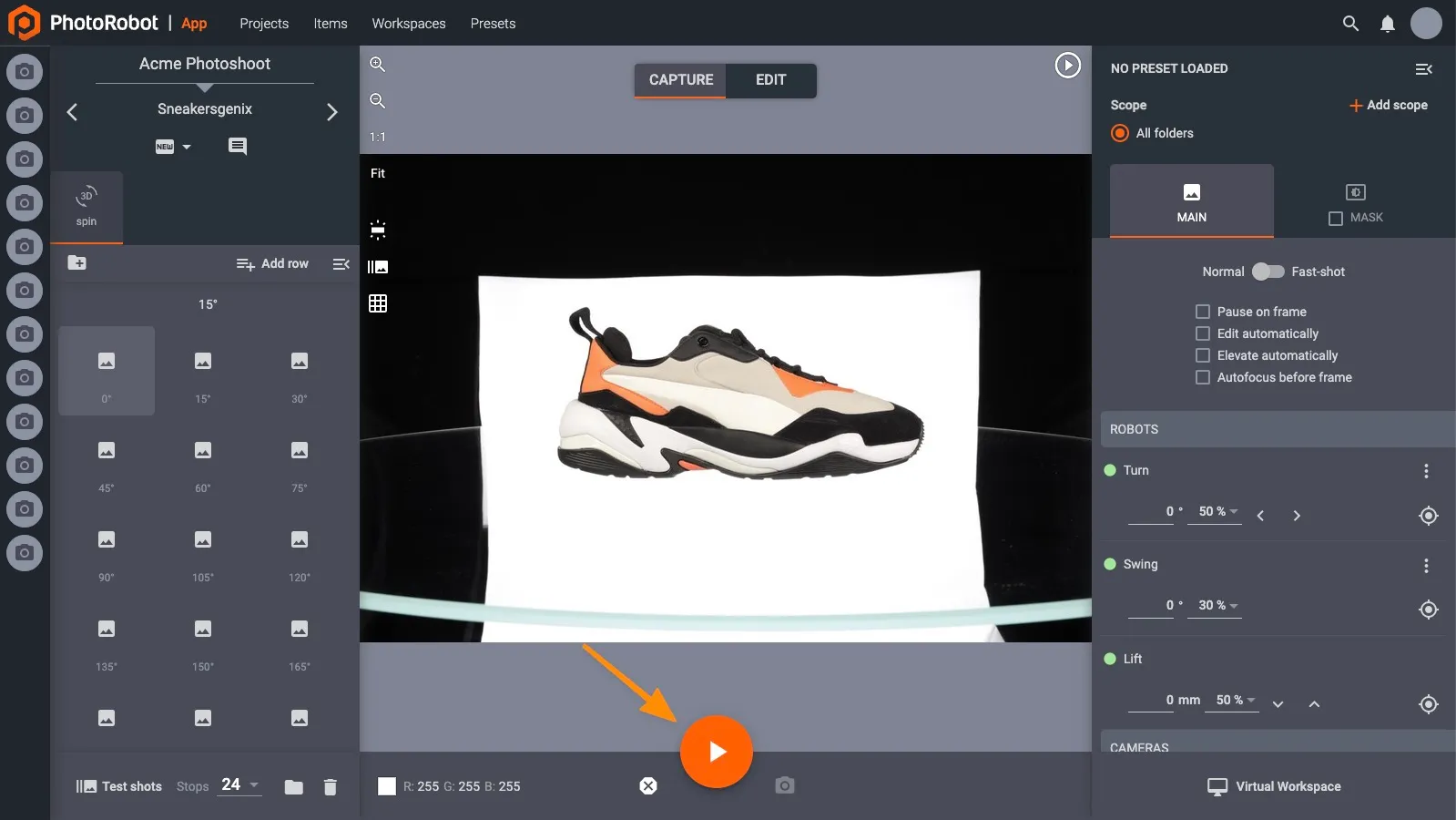
Fotograafia jada käivitamine
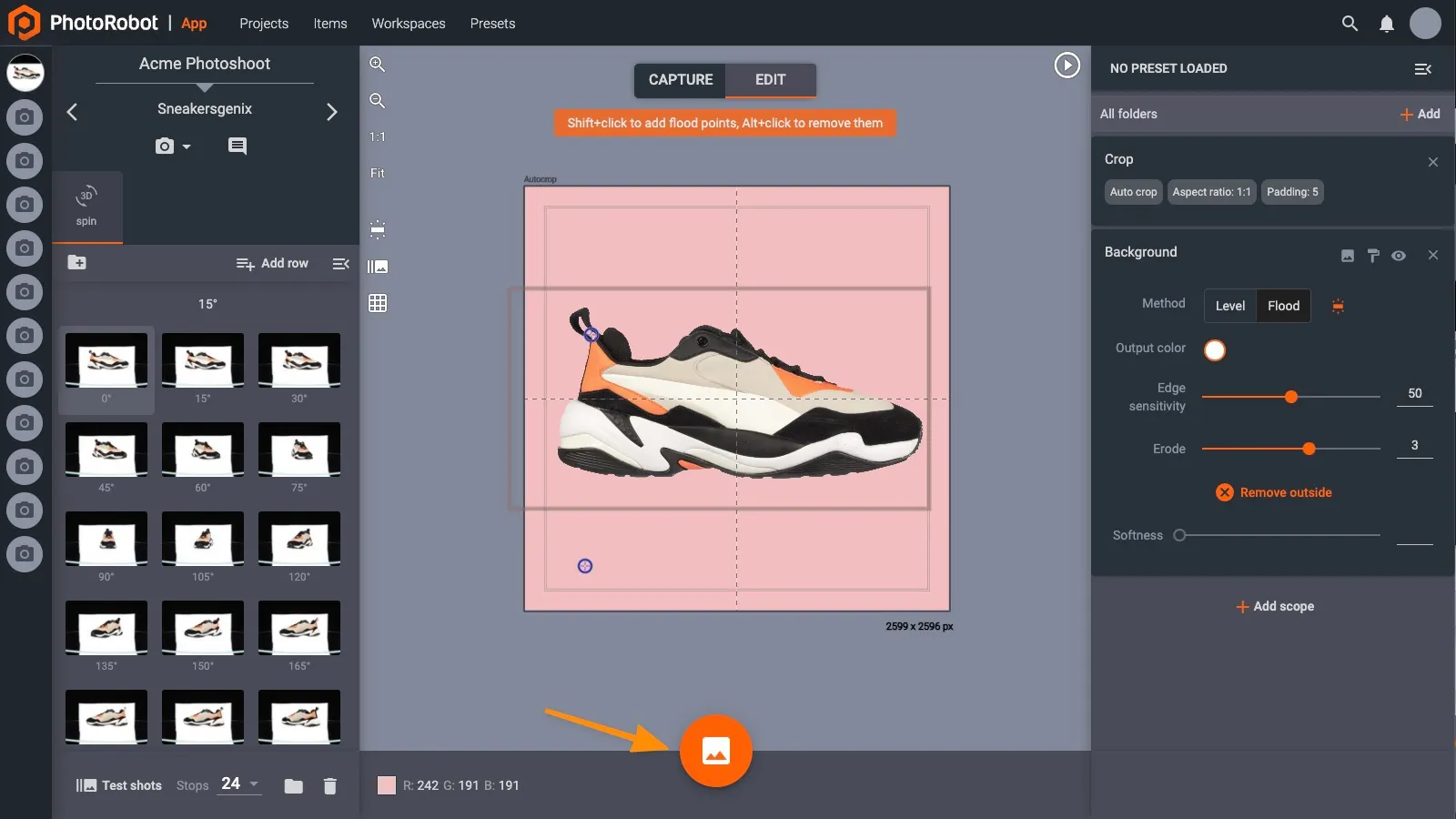
Kui olete rahul seadistustega, mida kontrolliti proovivõtte abil, on aeg käivitada fotoseeria. Seda saab käivitada, vajutades klaviatuuril tühikuklahvi või klõpsates alloleval pildil näidatud nuppu "Start".
Kui teil on vöötkoodiskanner, saate järjestuse käivitada ka spetsiaalse vöötkoodi "algus" skannimisega. Laadige veebist alla PhotoRobot'i vöötkood "start" ja printige see selle funktsiooni kasutamiseks välja.

Te teate, et järjestus on edukalt lõppenud, kui kõik vasakul küljel olevad pisipildid on piltidega täidetud. Hea tava on pöörata tähelepanu strobe tulede võimalikele tõrgetele.
Kui mõni pisipiltidest on teistega võrreldes tumedam, vähendage pöörlemiskiirust või vajadusel kontrollige tulede seisukorda. Seejärel saate need pildid märkida ja uuesti salvestada, ilma et peaksite kogu järjestust uuesti käivitama.
Kui hõiveseeria on lõppenud, saate lülituda redigeerimisrežiimile, kus teete järeltöötlust.
PhotoRobot makrod
CAPP-i makrod võimaldavad kasutajatel määratleda üksuse ja selle kaustade hõivamisprotsessi käske (spin, stills jne). Käske saab rakendada üksikutele või mitmele kaustale, käivitada jadasid, pilditöötlusi, tööruume, valmissätteid, kopeerida pildisätteid ja teisaldada pildisätteid. Kasutajad saavad makrosid veelgi kohandada ka nime, vöötkoodi, sildi või märkmete järgi.
Märkus: PhotoRobot makrode konfigureerimise ja kasutamise üksikasjalike juhiste saamiseks vaadake PhotoRobot makrode kasutusjuhendit. Saate teada, kuidas makrod võimaldavad fotograafia automatiseerimise maagiat mitme kausta ja komponendi vahel, keerukate ülesannete automaatse töötlemisega.
PhotoRoboti võlurirežiim
Wizards mode CAPP-is toimib alternatiivina käsitsi riistvara, kaamera ja järjestuse konfigureerimisele. Kasutamisel võimaldab Wizards mode administraatoril või fotograafil luua erinevaid Wizards-e, et lihtsustada jäädvustamisrežiimi tootmisliini operaatorite jaoks. Operaator saab seejärel käivitada CAPP-i Wizards mode'is, mis toimib äärmiselt lihtsa liidesena koos viisardiga juhitud sammudega. Kasutusmugavuse ja sisseelamise hõlbustamiseks on olemas ka piiratud juhtnupud.
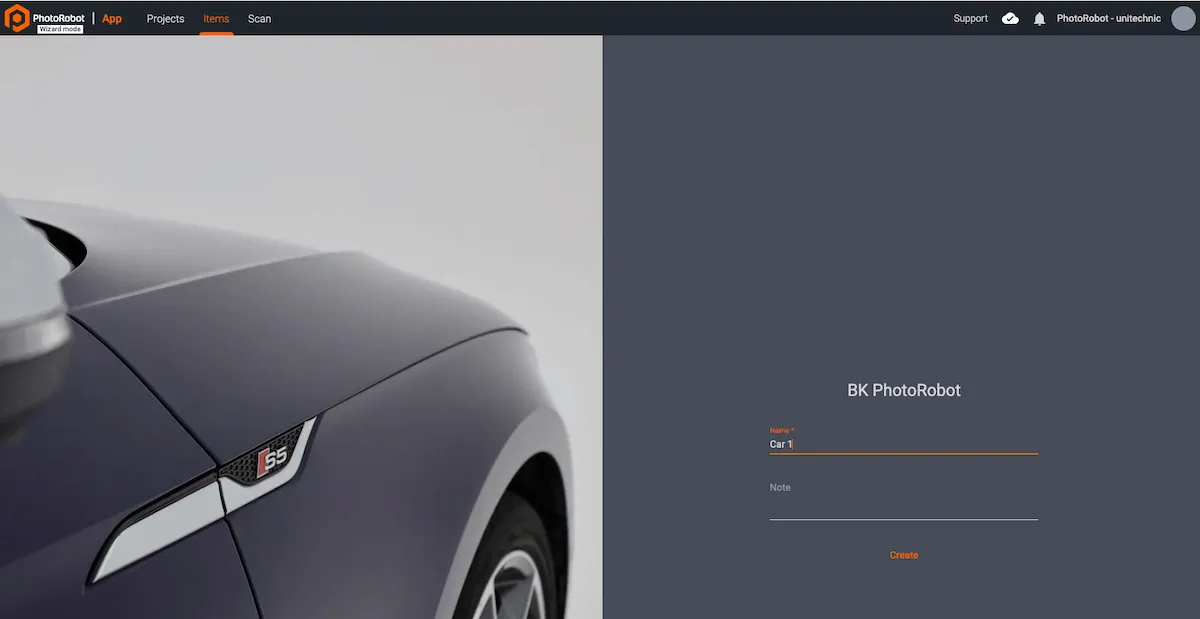
Pärast viisardi loomist salvestab see eelseaded ja tööruumi konfiguratsioonid, samuti eelmääratletud sammud, mida operaatorid peavad järgima. Operaatorid ei saa ühtegi seadet reguleerida ja nad peavad iga sammu juhised täitma, enne kui saavad järgmise protsessi juurde liikuda.
Märkus: Viisardi sammud on määratletud JavaScripti-laadses keeleformaadis ja PhotoRoboti konsultandid on need kohandatud funktsionaalsuse jaoks skriptinud. Kasutajad saavad skriptida ka põhilisi funktsioone esialgsete katsete või lihtsate seadistuste jaoks. Viisardite tehnilise konfiguratsiooni ja operaatori kasutamise dokumentatsiooni leiate PhotoRobot Wizard Mode kasutusjuhendist.
Režiimi liidese redigeerimine
Ekraani paremal küljel saate lisada suvalise arvu redigeerimistoiminguid.
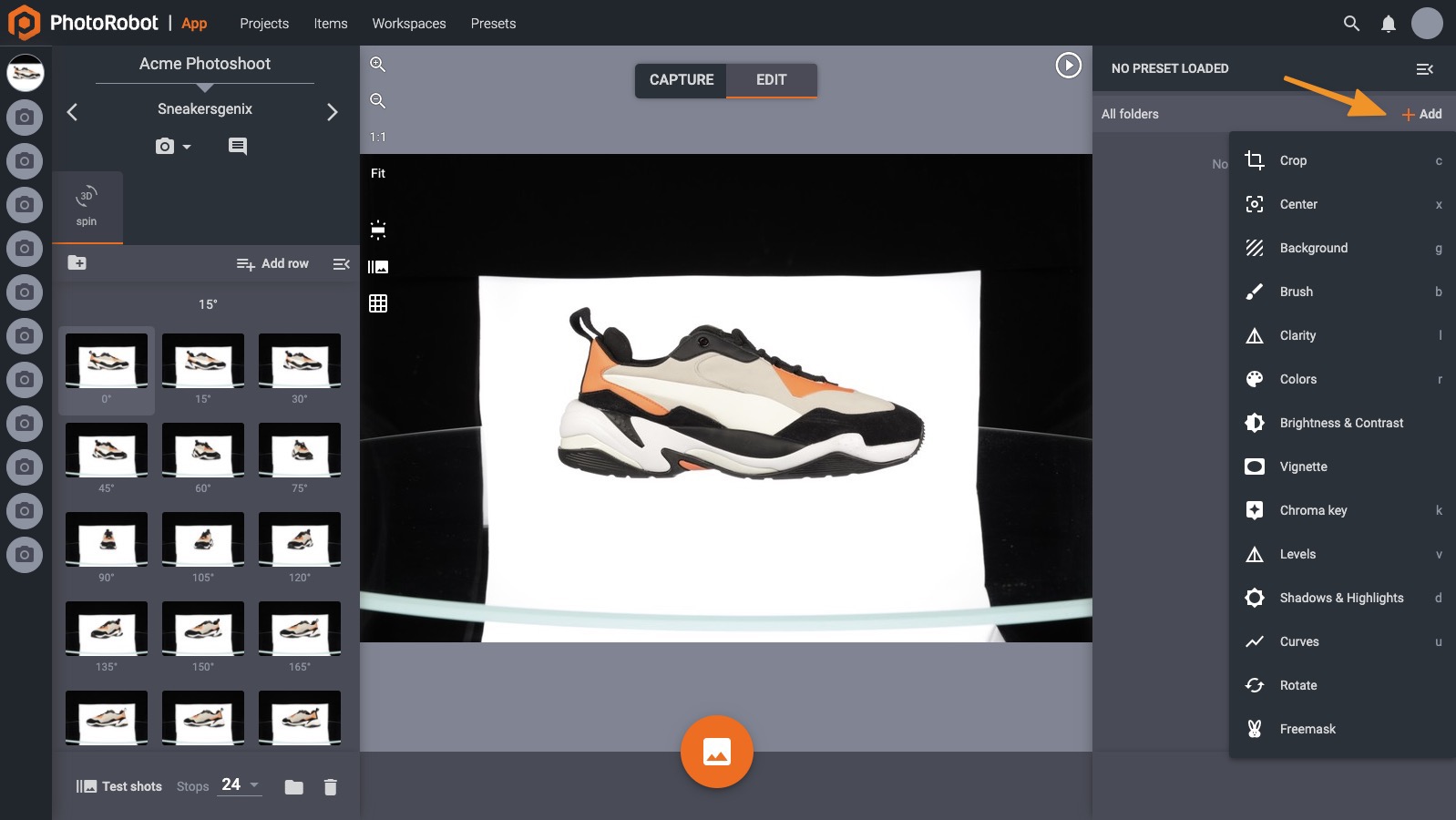
Ülaosas on loetletud mõned kõige levinumad redigeerimistoimingud: põllukultuur, keskpunkt ja taust.
Automaatne kärpimine
Kärpimine - piltide kärpimisel on kolm peamist juhtelementi: automaatse kärpimise, kuvasuhte ja polsterduse lülitid (mis määrab, kui palju ruumi on pildistatud objekti ümber).

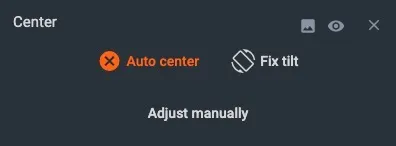
Automaatkeskus
Keskus - kuigi enamik PhotoRobot masinaid on varustatud laseritega, mis aitavad objekte pinnale paigutada, vajab enamik pilte täiendavat tarkvara tsentreerimist. See on eriti oluline 360° keerutuste puhul. Alustamisel on soovitatav hoida funktsiooni "automaatne keskus" sees, nagu on näha alloleval pildil:
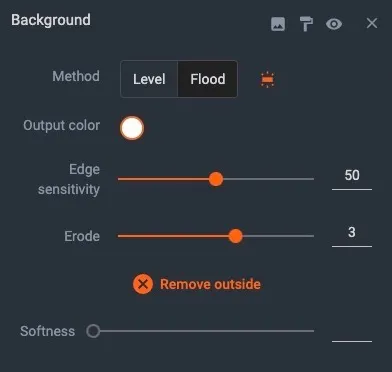
Tausta eemaldamine
Toiming Taust reguleerib pildi või pildikomplekti tausta, eemaldades soovi korral tausta täielikult. CAPP-i kolme erineva tausta eemaldamise meetodiga on võimalik saavutada erinevaid tulemusi. Tausta eemaldamine toimub taseme järgi, tausta eemaldamine üleujutuse ja vabamaskeerimise teel.
- Tausta eemaldamine taseme järgi kasutab RGB värvitasemete ja heleduse väärtuste tarkvaraanalüüsi tausta ja esiplaani tuvastamiseks. See on kasulik heledate või valgete esemete pildistamisel ja valge tausta kasutamisel. Reguleerige tarkvaras tasemeid, et muuta tausta heledus intensiivsemaks, kuni see muutub puhtaks valgeks. Seejärel on võimalik muuta taust läbipaistvaks või vahetada erinevat värvi tausta.
- Tausta eemaldamine üleujutuse abil toimib sarnaste põhimõtete järgi nagu tasandite kaupa tausta eemaldamine ja on kõige sagedamini kasulik tumedamate objektide pildistamisel. Tausta eemaldamine üleujutuse toiminguga muudab tausta heleduse intensiivsemaks, kuni see muutub eseme ümber puhtaks valgeks. Tasemete reguleerimise asemel kasutab tööriist tausta tuvastamiseks valitud punkti ja seejärel "ujutab" selle ala üle. Kasutajad klõpsavad lihtsalt pildistatavast objektist väljaspool asuvat punkti. Seejärel tuvastab tarkvara objekti servad ja rakendab selle ümber oleva ruumi täitmiseks üleujutust.
- Tausta tasuta maskeerimine nõuab rohkem konfigureerimist kui tasemete või üleujutuse kasutamine, kuid see võib olla üks täpsemaid ja kiiremaid meetodeid. See meetod kasutab väljalõigatud maski pilti ja toote põhipilti, komponeerides kaks pilti tausta eemaldamiseks . Mõnikord on see ainus tõhus viis tausta eemaldamiseks "raskemate" objektide ümbert. Võtame näiteks peegeldavad esemed või objektid, mis sisaldavad tühja ruumiga alasid. Vabamaskeerimine tuvastab objekti võrreldes kogu tühja ruumiga, eemaldades samal ajal vajaduse korral üksuse ümber ja selle sees oleva tausta. Meetod nõuab aga stuudiovalgustite täiendavat konfigureerimist, et luua tausta eemaldamiseks põhi- ja maskipildid.
Märkus: Pidage meeles, et see, kas CAPP suudab tausta eemaldada või mitte, sõltub peamiselt sellest, kuidas stseen on valgustatud. Kui te ei leia rahuldavalt toimivaid sätteid, pildistage pildid uuesti erinevate valgusseadetega.
Kui olete oma redigeerimissätetega rahul, rakendage parameetreid, klõpsates nuppu "Rakenda", mis asub seal, kus varem ilmus nupp "start".
Piltide avaldamine
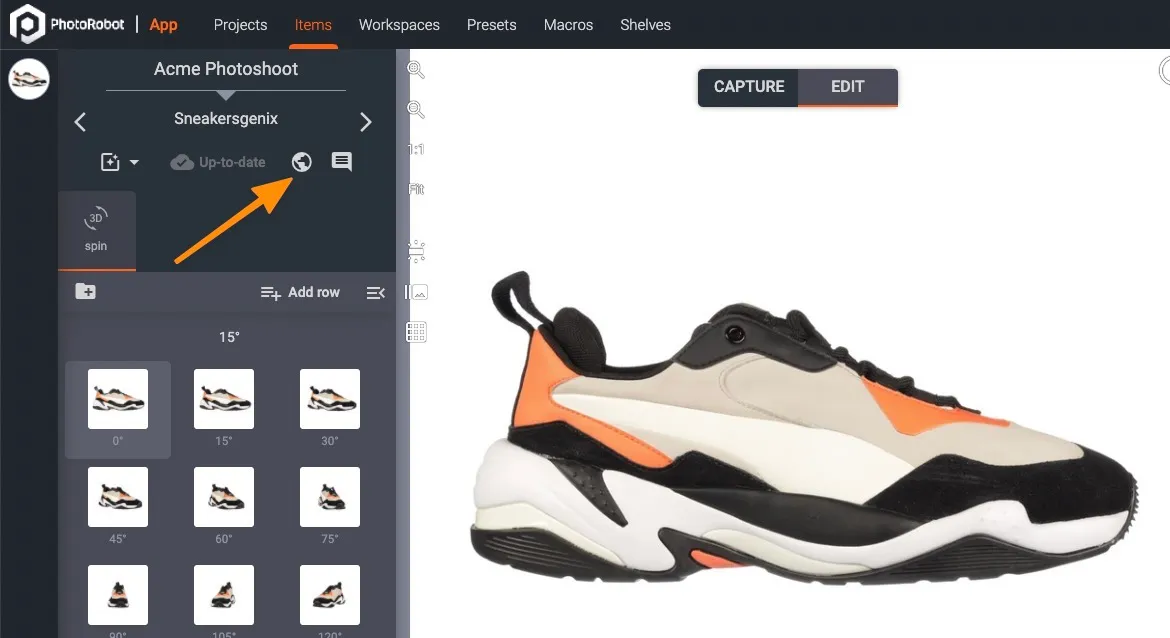
Kui edenemisriba on lõpule jõudnud, on teie muudatused teie piltidele edukalt rakendatud. Kui kasutate CAPP-d ilma PhotoRobot pilveteenusteta, salvestatakse saadud pildid kohaliku draivi kaustastruktuuri.
Kui kasutate PhotoRobot pilvemajutust, leiate faile ka PhotoRobot pilvsalvestusruumist. Nendele juurdepääsemiseks klõpsake ekraani vasakus ülanurgas olevas jaotises Fotod nuppu Ava pilves.
Piltide eksportimine
Üksuse eksportimiseks CAPP-ist saavad kasutajad eksportida kohalikule kettale või eksportida PhotoRobot pilve. Üksuse eksport võimaldab määratleda üksusi kohandatud nimetamistavadega, määrata pildi vormingut, eraldusvõimet ja erinevaid failinimemalli muutujaid.
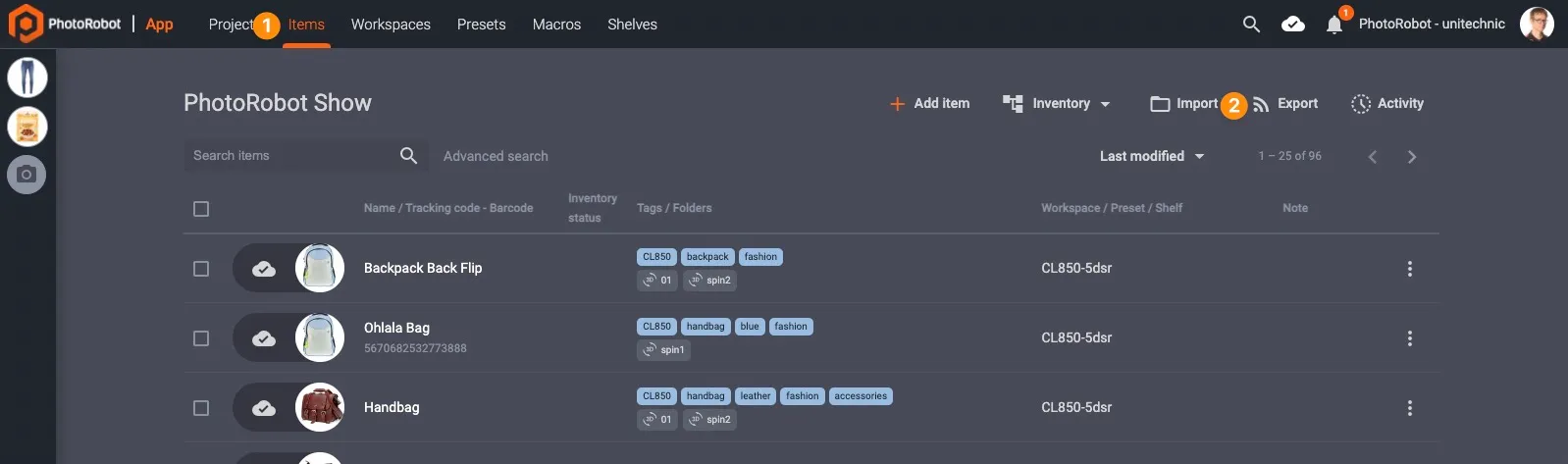
Üksuse ekspordisätetele juurdepääsemiseks minge jaotisse Üksused ja klõpsake üksuste loendi kohal olevas menüüs nuppu Ekspordi.
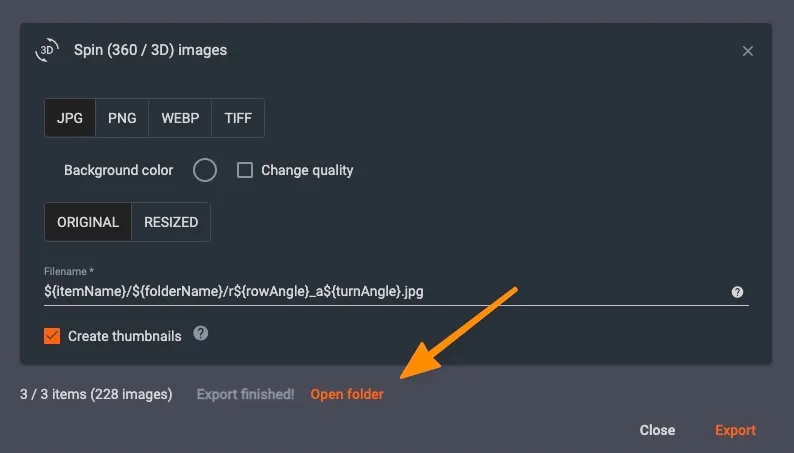
Avaneb järgmine aken, mis võimaldab teil muuta ekspordisätteid.
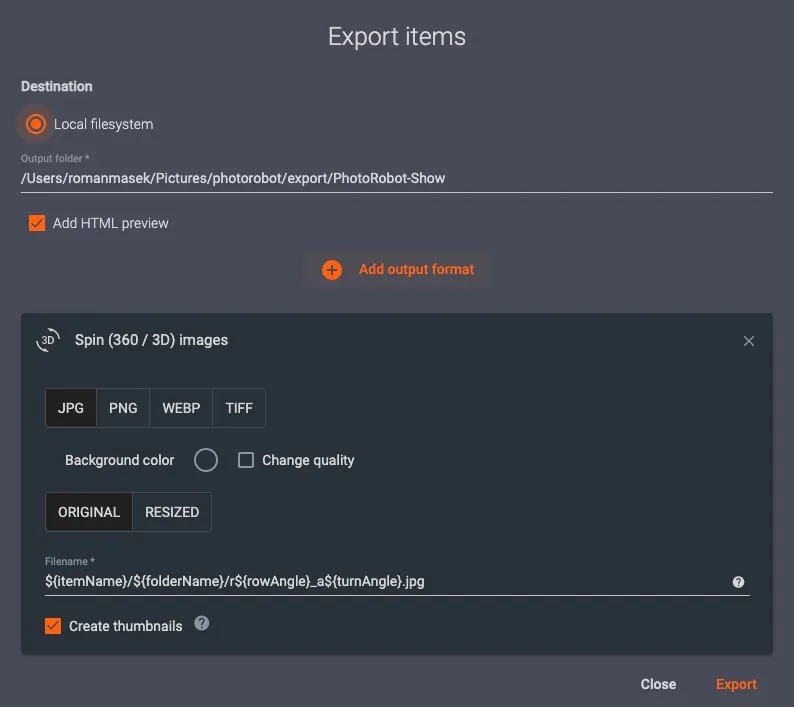
Ekspordiprotsessi käivitamiseks klõpsake selle akna paremas allnurgas nuppu Ekspordi .
Kui ekspordi edenemisriba on lõpule jõudnud, võite eksporditud piltidele juurdepääsemiseks klõpsata nuppu Ava kaust .
Avaldamine pilve kaudu
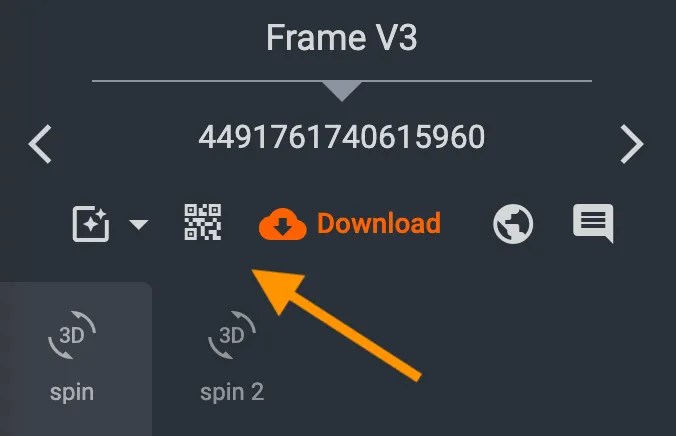
Kui avaldamine PhotoRobot pilveteenuste kaudu, avage üksus esmalt pilves. Liides kuvab jäädvustatud pildi. Klõpsake nuppu Koodid ja lingid.
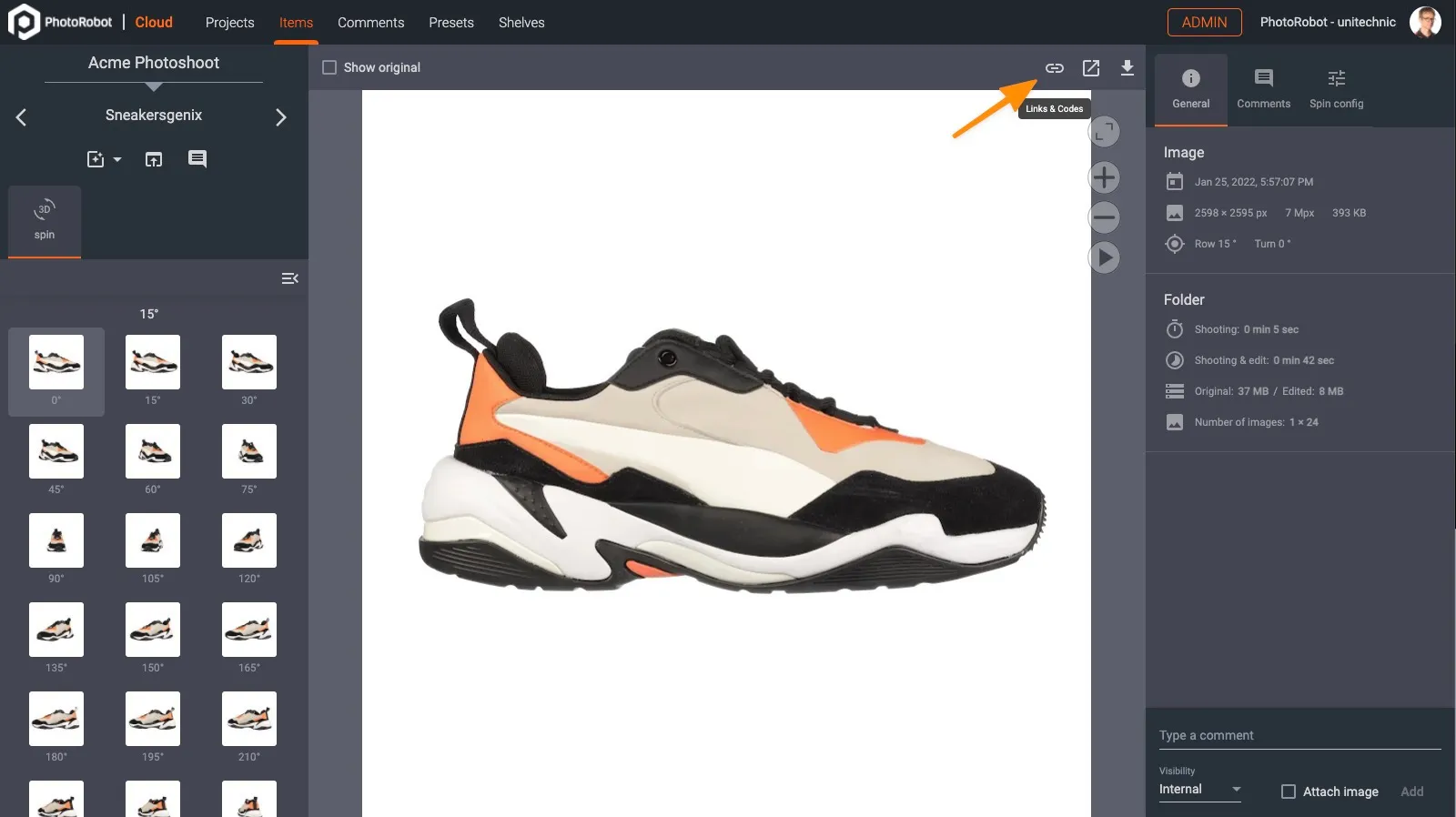
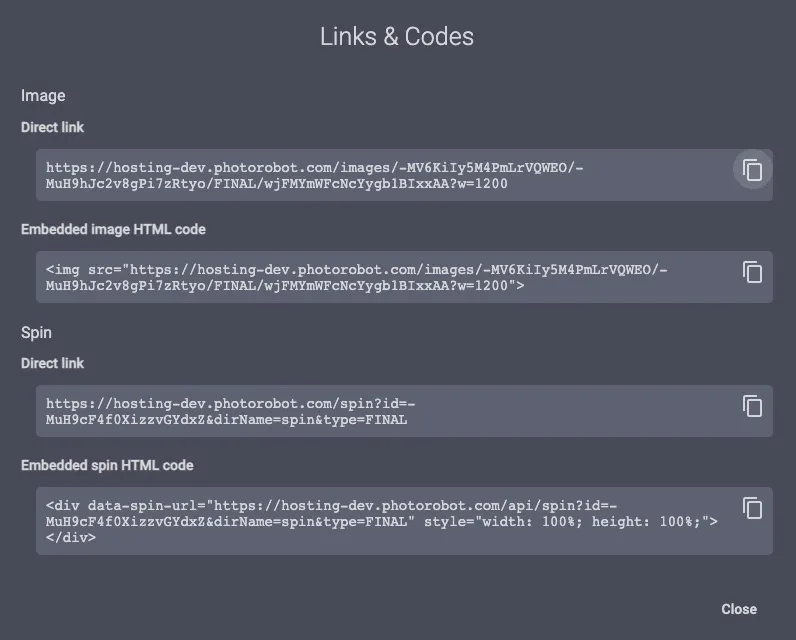
Kopeerige otselink ja kleepige see pildi vaatamiseks või keerutamiseks brauserisse. Kleepige see kood oma lehele, et manustada spinn kuvamiseks.


EOS Rebel seeria


EOS DSLR-seeria


EOS M peeglita seeria


PowerShot seeria


Lähivõte / käeshoitav

Canon EOS Rebel seeria pakub algajasõbralikke digipeegelkaameraid, millel on kindel pildikvaliteet, intuitiivsed juhtnupud ja mitmekülgsed funktsioonid. Need kaamerad, mis sobivad ideaalselt fotograafiahuvilistele, pakuvad usaldusväärset autofookust, muudetava nurgaga puuteekraane ja Full HD või 4K videosalvestust.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS digipeegelkaamerate seeria pakub kvaliteetseid pilte, kiiret automaatteravustamist ja mitmekülgsust, muutes selle ideaalseks nii fotograafia kui ka videote tegemiseks.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS M peeglita seeria ühendab kompaktse disaini digipeegelkaameraga sarnase jõudlusega. Vahetatavate objektiivide, kiire autofookuse ja kvaliteetsete pildianduritega kaamerad sobivad suurepäraselt reisijatele ja sisuloojatele, kes otsivad kaasaskantavust ilma pildikvaliteeti ohverdamata.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni PowerShoti seeria pakub kompaktseid ja kasutajasõbralikke kaameraid juhuslikele pildistajatele ja entusiastidele. Mudelid, mis ulatuvad lihtsatest sihi-ja-pildista kuni täiustatud suumkaamerateni, pakuvad mugavust, kindlat pildikvaliteeti ja selliseid funktsioone nagu pildistabilisaator ja 4K-video.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni lähivõtete ja käeshoitavad kaamerad on loodud üksikasjalikeks, lähedalt pildistamiseks ja videote tegemiseks. Kompaktsed ja hõlpsasti kasutatavad need pakuvad täpset teravustamist, kõrge eraldusvõimega pildistamist ja mitmekülgseid makrofunktsioone – ideaalsed vlogimiseks, tootepildistamiseks ja loomingulisteks lähivõteteks.


