PhotoRobot SynchroBox – funktsionaalsus ja seadistusjuhend

Järgmine dokumentatsioon kirjeldab PhotoRobot SynchroBoxi funktsionaalsust ja seadistust, mis on mitmekaameraline kontroller, mis toetab PhotoRobot MultiCami. See teave on mõeldud PhotoRobot'i klientide toetamiseks, kes on hiljuti ostnud seadme ja kasutavad PhotoRobot'iga rohkem kui ühte kaamerat. SynchroBox toimib mitme kaamera keskusena, mis sünkroniseerib kahe või enama kaamera katiku heli. Loe edasi, et mõista SynchroBoxi teooriat, funktsionaalsust ja seadistust, et hõlbustada seadme põhilist mõistmist ja esimest töökorda.
Tähtis: PhotoRoboti süsteemi esialgse paigalduse peab alati teostama volitatud PhotoRoboti asutus. PhotoRoboti paigaldamiseks volitatud asutused on heakskiidetud edasimüüja või tootja esindaja. Lisaks lugege alati enne PhotoRoboti esmakordset kasutamist PhotoRoboti ohutusteavet ja juhiseid ning kõiki teie seadmega kaasasolevaid juhendeid.
Märkus: PhotoRobot MULTICAMi kokkupaneku ja esmakordse kasutamise juhiste saamiseks vaadake PhotoRobot MULTICAMi ja CENTERLESS TABLE'i paigaldusjuhendit.
SynchroBoxi tehniline kasutusjuhend
Aitäh ja palju õnne PhotoRobot ostu puhul. PhotoRobot esindab aastakümnete pikkust isiklikku professionaalset kogemust ja innovatsiooni automatiseeritud fotograafias. Iga seade pakub valmis lahenduste ökosüsteemi, mille funktsioonid on kohandatud vastavalt teie ettevõtte unikaalsetele vajadustele.
Tere tulemast PhotoRobot'i. Kasutage järgmist tehnilist teavet, et alustada oma teekonda tootmise mõistmise ja maksimeerimise suunas PhotoRobot-toel töötavas stuudios.
1. PhotoRobot SynchroBox – teooria
PhotoRobot SynchroBox on vajalik kaamera katiku sünkroniseerimiseks, kui kasutatakse kahte või enamat kaamerat koos PhotoRobot süsteemidega. SynchroBox toimib mitme kaameraga keskusena, et sünkroniseerida erinevate kaamerate poolt tehtud üksikute kaadrite jäädvustamine täpselt õigel hetkel. See on lahendus probleemile, mis tekib kaameratega, millel on erinevad säriaeg, ning toetab kokku kuni 8 kaamerat.
SynchroBoxi teooria mõistmiseks võtame näiteks standardse jäädvustamise režiimi ja kiire pöörleva jäädvustamise režiimi järjestused PhotoRobot'iga.
Tavapärases jäädvustusrežiimis on järgmine järjestus.
a) Plaat liigub soovitud nurga alla.
b) Plaat peatub.
c) Kaamera pildistab objekti.
d) Plaat hakkab liikuma järgmisse nurka.
Selles olukorras pole vaja kohandada.
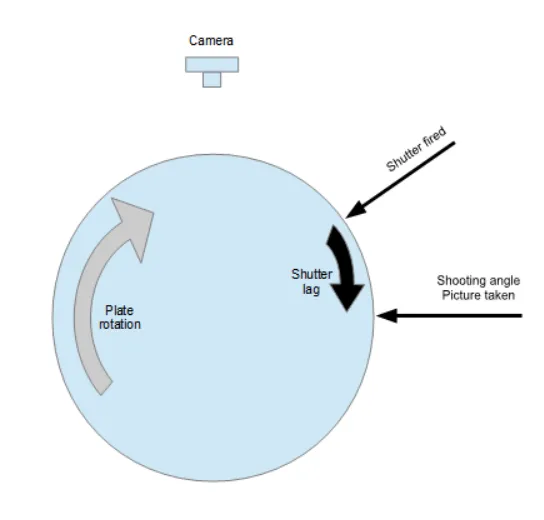
Kiire pöörlemise jäädvustamise režiimis nõuab järjestus veel mitut etappi.
a) Plaat hakkab pöörlema etteantud kiirusel.
b) Juhtseade tunneb ära lähenemise nurga, mida püütakse.
c) Juhtseade käivitab kaamera katiku eelnevalt katiku kaabli kaudu.
d) Kaamera alustab jäädvustamist (sensori kardina liikumine jne).
e) Jäädvustamisprotsess nõuab ligikaudu 50 millisekundit ("säriaeg").
f) Plaat liigub pidevalt katiku viivituse ajal.
g) Plaat jõuab soovitud nurga täpselt siis, kui kaamera säriaeg on lõppenud, tehes pildi.
h) Juhtseade tuvastab, et järgmine jäädvustamisnurk läheneb, korrates salvestusprotsessi seoses katikuviivitusega.
i) Plaadi pöörlemine lõpeb pärast 360 kraadi, peatades kogu liikumise.
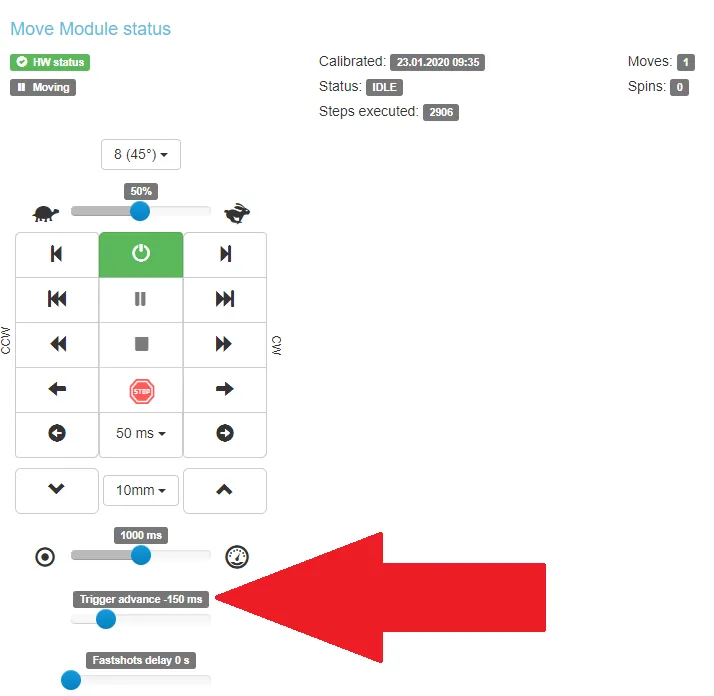
Märkus: Kuna igal kaameral on erinev katiku viivitus, tuleb iga kaamera jaoks reguleerida Control Uniti säriaja ettevõtmist. See on võimalik Control Uniti (6. põlvkond) puhul teenuse GUI kaudu, kasutades valikut "Trigger advance". "Trigger advance" väärtus peab olema suurem kui kaamera säriaeg. Näiteks, kui kaamera katiku viivitus on 80 ms, peaks "päästiku edasiliikumine" olema ligikaudu võrdne või suurem kui 90 ms.
2. Seadme kirjeldus - PhotoRobot SynchroBox
Disaini poolest on SynchroBox rack-mount seade, mis on mõeldud kahe või enama kaamera kaamera katikute sünkroniseerimiseks. See on vajalik iga PhotoRobot süsteemi kasutamisel, kasutades korraga rohkem kui ühte kaamerat. Üks SynchroBox toetab kuni 8 kaamerat, pakkudes lahendust erinevate kaamerate katiku viivituste lahendamiseks.


Võtame näiteks olukorra, kus mõlema kaamera jagajana on ainult kaks kaamerat ja SynchroBox, ilma täiendava seadistuseta. Samal ajal on juhtseadme G6 "Trigger advance" väärtus null. Katiku käivitamine toimub siis, kui plaat jõuab soovitud nurga alla.
Sellisel juhul on jada sammud järgmised:
a) Plaat jõuab soovitud nurgani.
b) Juhtseade käivitab kaamera katiku katiku kaabli kaudu.
c) Mõlema kaamera katiku viivitus loendab alla, kui plaat liigub pidevalt.
d) Esimene kaamera teeb pildi 50 ms pärast soovitud jäädvustamispunkti, kasutades "soovitud nurka + X" kraadi.
e) Teine kaamera jäädvustab pildi 70 ms pärast soovitud jäädvustamispunkti, kasutades "soovitud nurka + Y" kraadi.
f) "Y" väärtuse kraadid on suuremad kui "X" väärtusastmed.
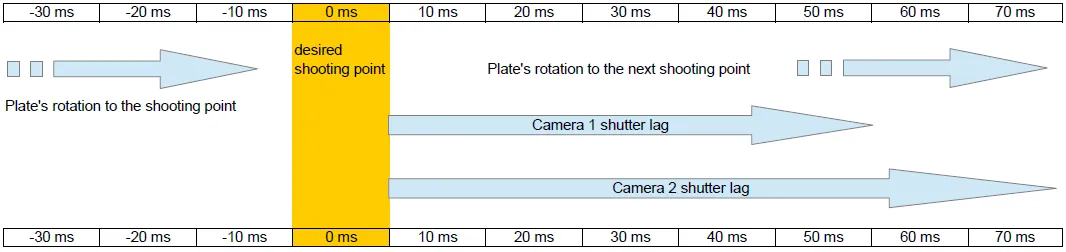
Selle tulemusena ei jäädvusta soovitud nurgast pilti. Seetõttu on vajalik reguleerimine, et mõlemad kaamerad pildistaksid soovitud jäädvustamispunkti õigel hetkel.
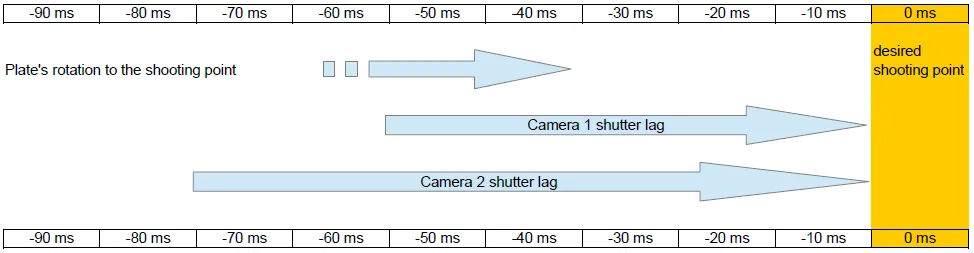
Selleks saab SynchroBox Control Unit G6-lt "katiku väljumise" impulsi ja tuvastab automaatselt impulsi pikkuse.
Lisaks on SynchroBoxil iga ühendatud kaamera säriaja viivituse väärtus, mis sisestati käsitsi seadistamisel.
Nende kahe parameetri abil loendab ja käivitab SynchroBox iga kaamera katiku sobiva ettejuhtimisega.
3. Kuidas mõõta kaamera katiku viivitust
Kaamera katikuviivituse mõõtmiseks on vajalik, et PhotoRobot oleks ühendatud mis tahes pöörleva plaadiga, juhtseade G6+ ja kaamera, mis on ühendatud katiku kaabliga juhtseadmega.
Seejärel tuleb kaameraga ühendada kohalik arvuti, millel on PhotoRobot Controls rakendustarkvara, USB-kaabli kaudu.
Lõpuks on vajalik 360-kraadine protraktor (veebist allalaaditav), et täita järgmised sammud.
a) Aseta protraktor PhotoRobot seadme plaadile, kasutades mistahes osutit, mis on paigutatud plaadist väljapoole ja osutab servale.
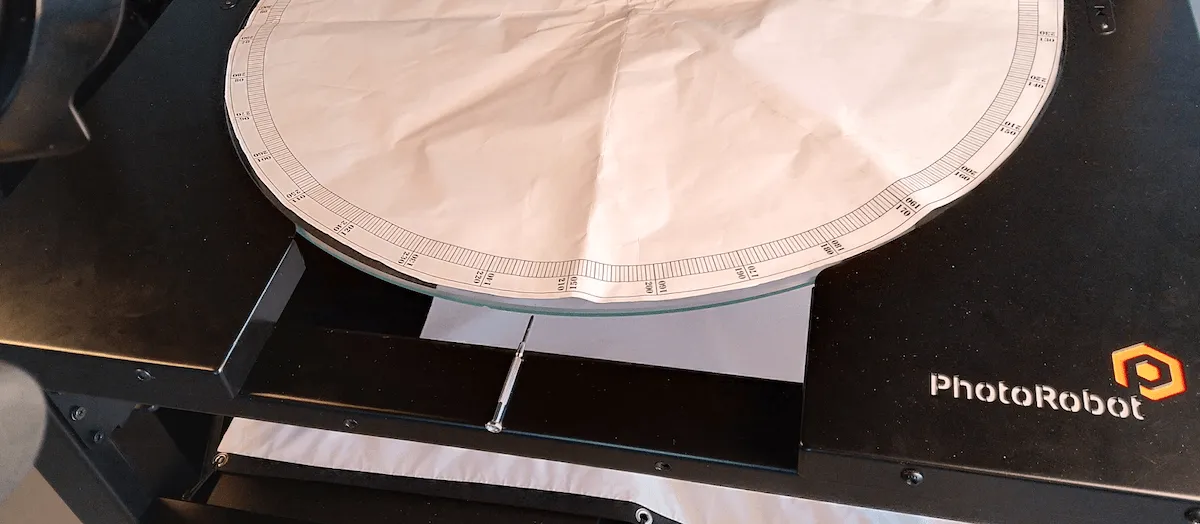
b) Keera plaat, kuni osuti on nullis. Märkus: See samm on võimalik käsitsi ka siis, kui elektrimootorid on välja lülitatud.
c) Käivita PhotoRobot Controls rakenduse tarkvara, logi oma kontole sisse ja loo töökeskkonnas üksus, arvestades antud konfiguratsiooni. Seejärel ava Capture režiim ja ava kaust "Other".
d) Seejärel ava uues vahekaardis brauseris juhtseadme (G6) teenuse kasutajaliides, mis võimaldab kontrolli plaadi üle IP-aadressi abil.
e) Teenuse GUI-s seadista robot järgmiste parameetritega:
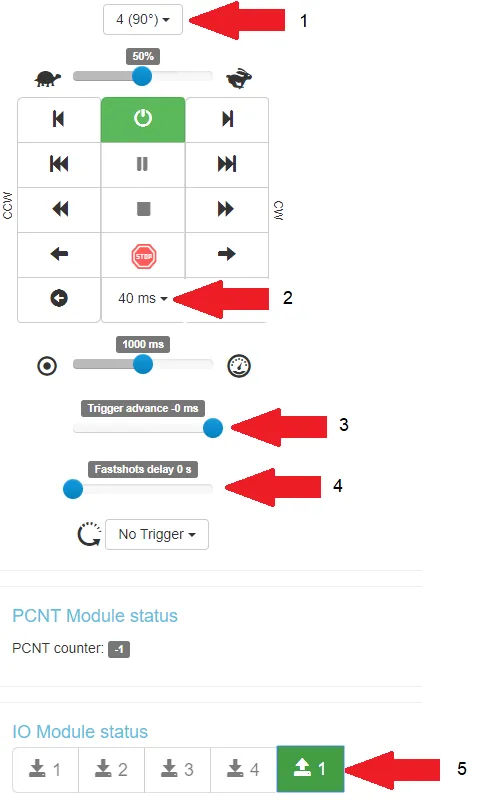
- 1 = 4 pilti 90 kraadi võrra;
- 2 = 40 ms impulsi pikkus katiku käivitamiseks;
- 3 = päästiku edasiliikumine 0 ms (ilma edasiliikumiseta);
- 4 = ei ole kiireid lööke viivitust
- 5 = aktiveeritakse katiku poolvajutus
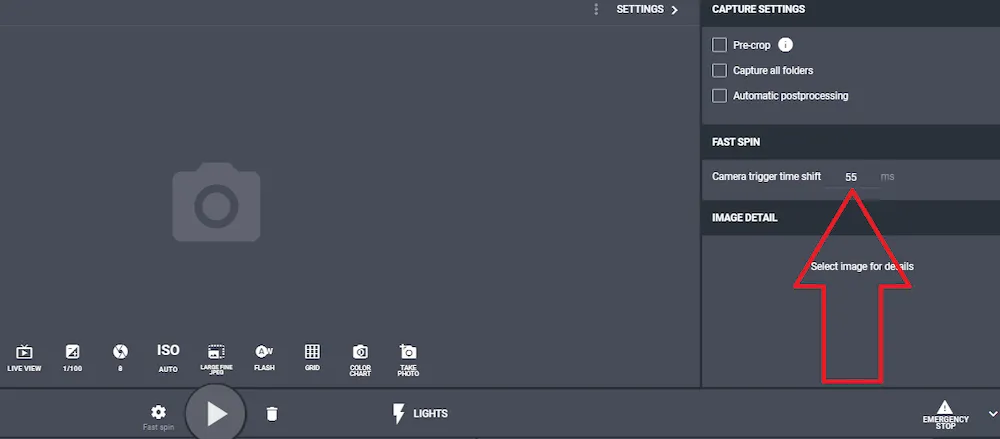
f) Alusta järjestust, klõpsates juhtpaneeli paremas alumises nurgas paremal noolel:
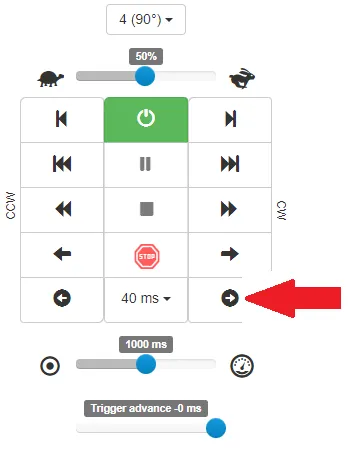
Märkus: Järjestus algab 90 kraadist ja lõpeb 0 kraadiga. Samal ajal salvestatakse kõik fotod kausta "Muu" Juhtnuppude rakenduses, nagu eelnevalt seadistatud.
Näiteks vaata järgmisi näidisväljundeid (pöörlemise suunaga vasakule):
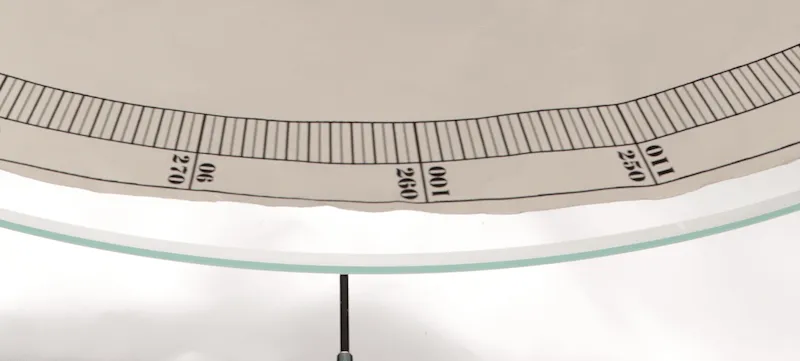
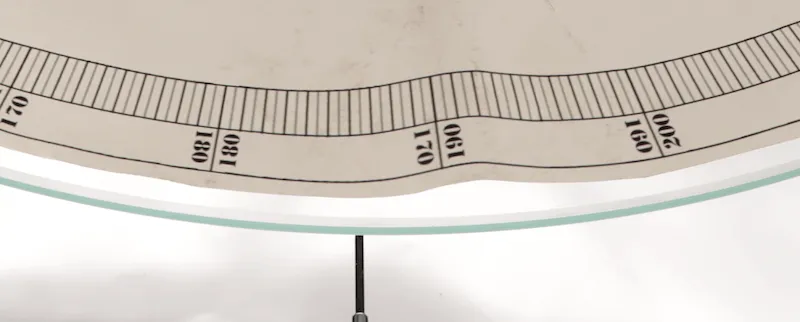
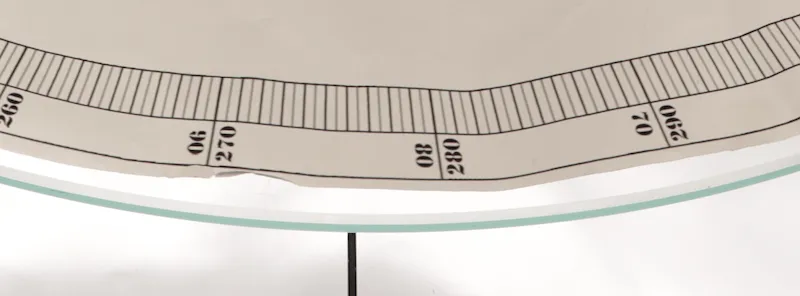
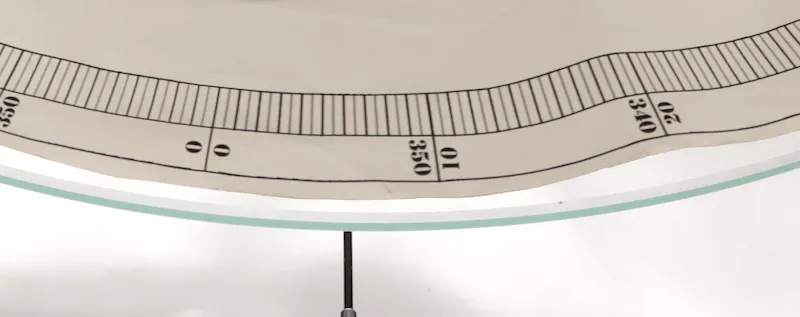
- Märkus: Nendes näidetes toimus pildi jäädvustamine umbes 6 kraadi pärast päästiku käivitamist.
g) Järgmisena, et teisendada 6 kraadi millisekundite arvuks (ms), alustage PhotoRobot'i plaadi pidevat pöörlemist sama kiirusega kui teenuse kasutajaliideses eelmine samm.
- Alusta stopperiga ja salvesta 10 lasku aeg.
- Selles testjuhtumis on tulemuseks 61 sekundit (61 000 ms).
- See tähendab, et 10 lasku võrdub 10 * 360 kraadi (3 600 kraadi).
- On 1-kraadine ajaline liikumine, mis kestab 61 000 ms / 3 600 kraadi, mis võrdub 16,94 ms-ga.
- On 6-kraadine ajaliikumine, mis kestab 16,94 ms * 6, mis võrdub 101,64 ms.
- Seega on ligikaudne katiku viivitus ligikaudu 102 ms.
h) Lõpuks on vaja kõiki eelnevaid samme korrata, et tuvastada iga erineva kaamera katiku viivituse.
4. SynchroBoxi seadistus
SynchroBoxi seadistamiseks on eeltingimus, et paigaldatud juhtseade (G6) oleks paigaldatud ja täielikult töökorras. Veelgi enam, ideaalis oleks 2 või enam sama tootja ja sama mudeli kaamerat, millest igaühel on teadaolev katiku viivitus.
Sellisel juhul kasuta järgmisi samme SynchroBoxi seadistamiseks.
4.1. Ühenda SynchroBox juhtseadme G6-ga katiku kaabli kaudu. Märkus: See katiku kaabel on PhotoRobot poolt SynchroBoxi kohaletoimetamise osana või osa numbri KHCAR1R05 all. Katiku kaabel ühendab Control Unit G6 "OUT" pordi SynchroBox "->IN" pordiga (väiksem, mitte teine "=>IN").
4.2. Ühenda SynchroBox võrku tavalise Etherneti kaabli kaudu, kasutades sama alamvõrku, mis ühendub juhtseadmega.
4.3. Ühenda kõik töös olevad kaamerad SynchroBoxiga katiku kaablite abil.
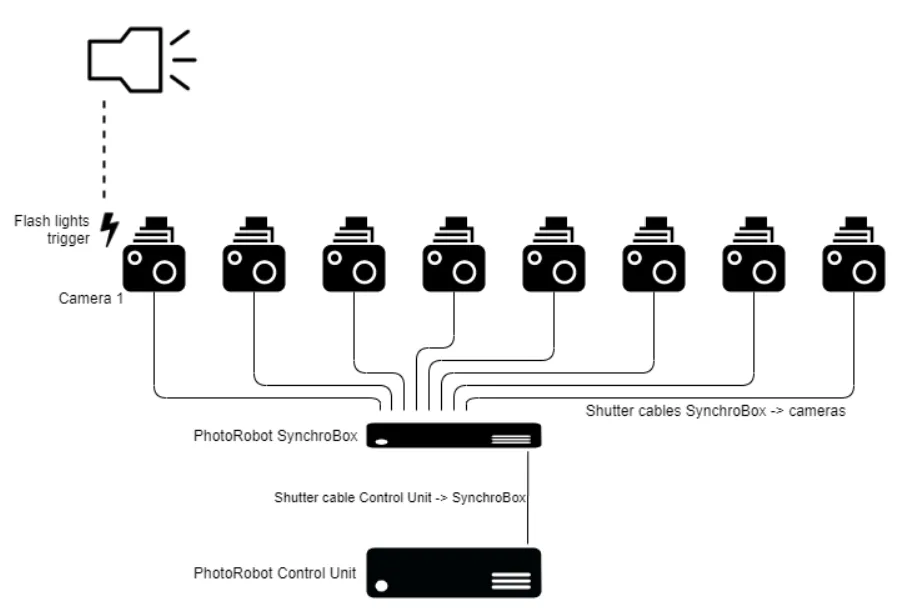
Märkus: SynchroBoxi katiku kaablid kaameratele tarnitakse PhotoRobot poolt osanumbritega KHCARCJ (Canon Jack 2,5 mm pistik) või KHCARN3 (Canon N3 pistik) ning pikenduskaablid KHCAR1R05, või nn katiku kaabli komplektina.

4.4. Pane tähele, et kaamera 1 (SynchroBoxi port 1) hoiab ja juhib välklampide käivitamisseadet. Sellel kaameral peab olema suurim säriaeg.
4.5. Seadista juhtseadme (G6) "Trigger advance" väärtus vastavalt aeglasema kaamera katiku viivitusele (eelnevalt kirjeldatud selle dokumendi jaotises 1). Märkus: PhotoRobot Controls rakendust kasutades olge teadlikud, et see väärtus on kohandatud või asendatud Capture režiimi - Fast Spin väärtusega:
4.6. Seejärel pääse ligi SynchroBoxi teenuse kasutajaliidesele, sisestades selle IP-aadressi URL-formaadis oma veebibrauserisse.
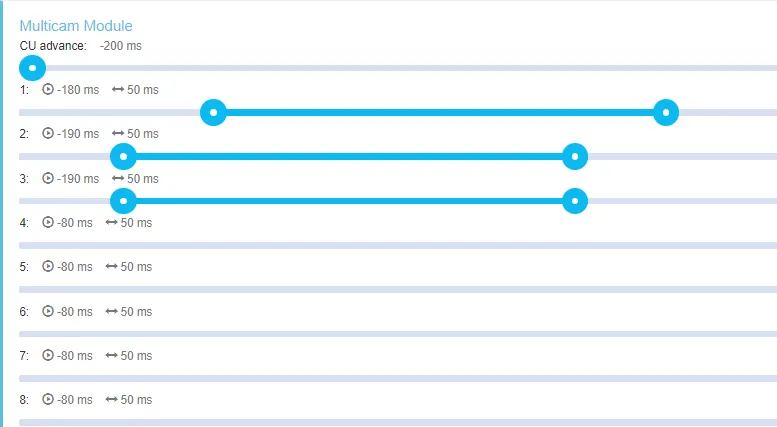
4.7. Seadista esimene liugur "CU advance" samale väärtusele, mis on juhtimisseadmes või vastavaks väärtuseks PhotoRobot Controlsis. Märkus: Pane tähele, et kui need kaks väärtust erinevad, on PhotoRobot Controlsi väärtus tähtsam. Seejärel on 8 liugurit, mis vastavad SynchroBoxi 8 pordile. Liuguril on kaks väärtust: edasiliikumine (vasak nupp) ja impulsi pikkus (parem nupp). Edasijõudnud väärtus võrdub juhitava kaamera katiku viivitusega (väikseim reaalväärtus on ligikaudu -50 ms). Impulsi pikkus sõltub seejärel ajaraamist, mille jooksul kaamera katiku kaabel hoiab kontakti. Selle väärtuse annab kaamera tootja või, kui see pole teada, võib määrata 40–60 ms.
4.8. Seadista sisendkanal SynchroBoxi teenuse GUI-s. Märkus: PhotoRobot'i katiku kaablite kasutamisel on seadistus alati järgmine.
- SADAMAS: A = fookus, B = päästik
- Port 1 - 8: A = päästik, B = fookus
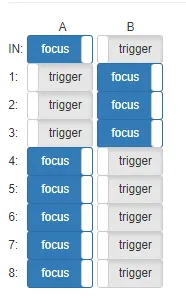
- Pane tähele, et ülaltoodud näites on seatud ainult kaamerad 1, 2 ja 3.
- Kuna PhotoRobot on mõeldud välklampide kasutamiseks, sea kaamera 1 säriaeg 1/100 või 1/125 peale.
4.9. Lõpuks seadistage kõigi teiste kaamerate algne seadistus palju pikemale säriajale, nt 1/30 - 1/60. See aitab arvestada võimalike erinevustega katiku viivituses kasutatavate kaamerate vahel. Pikem ajaraam tagab ka, et kõik kaamerad jõuavad välgu tipphetkeni kõigi stroboskoopide kaudu. Kui see töötab õigesti, on võimalik vajadusel katsetada teiste kaamerate säriaega vähendades.
5. Mitme SynchroBoxi seadistus
SynchroBox toetab maksimaalselt 8 kaamerat. Kui on vaja rohkem kui 8 kaamerat, on võimalik kasutada SynchroBoxide arvu korrutada.

- Ühenda esimese SynchroBoxi OUT port järgmise SynchroBoxi IN pordiga, kasutades sama katiku kaablit, mis ühendab juhtseadme SynchroBoxiga. See katiku kaabel on PhotoRobot poolt SynchroBoxi kohaletoimetamise osana või osa numbri KHCAR1R05 all.


EOS Rebel seeria


EOS DSLR-seeria


EOS M peeglita seeria


PowerShot seeria


Lähivõte / käeshoitav

Canon EOS Rebel seeria pakub algajasõbralikke digipeegelkaameraid, millel on kindel pildikvaliteet, intuitiivsed juhtnupud ja mitmekülgsed funktsioonid. Need kaamerad, mis sobivad ideaalselt fotograafiahuvilistele, pakuvad usaldusväärset autofookust, muudetava nurgaga puuteekraane ja Full HD või 4K videosalvestust.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS digipeegelkaamerate seeria pakub kvaliteetseid pilte, kiiret automaatteravustamist ja mitmekülgsust, muutes selle ideaalseks nii fotograafia kui ka videote tegemiseks.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS M peeglita seeria ühendab kompaktse disaini digipeegelkaameraga sarnase jõudlusega. Vahetatavate objektiivide, kiire autofookuse ja kvaliteetsete pildianduritega kaamerad sobivad suurepäraselt reisijatele ja sisuloojatele, kes otsivad kaasaskantavust ilma pildikvaliteeti ohverdamata.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni PowerShoti seeria pakub kompaktseid ja kasutajasõbralikke kaameraid juhuslikele pildistajatele ja entusiastidele. Mudelid, mis ulatuvad lihtsatest sihi-ja-pildista kuni täiustatud suumkaamerateni, pakuvad mugavust, kindlat pildikvaliteeti ja selliseid funktsioone nagu pildistabilisaator ja 4K-video.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni lähivõtete ja käeshoitavad kaamerad on loodud üksikasjalikeks, lähedalt pildistamiseks ja videote tegemiseks. Kompaktsed ja hõlpsasti kasutatavad need pakuvad täpset teravustamist, kõrge eraldusvõimega pildistamist ja mitmekülgseid makrofunktsioone – ideaalsed vlogimiseks, tootepildistamiseks ja loomingulisteks lähivõteteks.


