PhotoRobot Robotic Arm V8 kasutusjuhend

Järgmine paigaldusjuhend sisaldab tehnilisi juhiseid PhotoRobot Robotic Arm V8 konfigureerimiseks ja kasutamiseks. Selle teabe eesmärk on toetada robotkäe esmakordset seadistamist ja kasutamist kliendi poolt. See keskendub uutele klientidele, kes on seadme hiljuti ostnud, samuti tootmisliini operaatorite tulevasele liitumisele.
Tähtis: Enne PhotoRobot seadmete isepaigaldamise, esmakordse kasutamise, hoiustamise või hooldamise jätkamist vaadake alati PhotoRobot'i ohutusteavet ja juhiseid.
Robotkäsi V8 paigaldamine ja esmakordne kasutamine
Täname, et ostsite oma PhotoRobot seadme. Olete valinud toote, mis toob endaga kaasa aastakümnete pikkuse töökogemuse ja innovatsiooni. Geniaalne ja stiilne PhotoRobot'i disain on teie jaoks. See tähendab, et alati, kui kasutate PhotoRobot'i, võite olla kindel, et saavutate iga kord suurepäraseid tulemusi. Tere tulemast PhotoRobot'i.
1. Toote kirjeldus
Robotic Arm V8 on loodud mitmerealiste pöörete automaatseks jäädvustamiseks ehk kiireks pildistamiseks erinevatest kõrgustest. See suudab liigutada kaamerat kahe telje suunas sujuva robotliku täpsusega, juhtides kõrgust ja kiikumist. Arm ühendab ühilduvad fotograafia plaadimängijad nagu Centerless Table ning Robotic Grammof, C-klassi plaadimängijad ja teised. See sünkroniseerib pildi jäädvustamise paigaldatud kaamera liikumise ja toote pöörlemisega plaadimängijal.

Robotkäsi V8 põhikomponendid on järgmised:
- Süsteemi juhtseade (eraldi seade robotkäe juhtimiseks).
- Kaamera kinnitusvarred (üks lühike vars, üks pikk vars või mõlemad).
- Robotkäsi masina alus sissetõmmatavate ratastega hõlpsaks transportimiseks.
- Dokkimisjaam kiireks seadistamiseks ühilduvate plaadimängijate ja seadmetega.
Märkus: Kaamera käsi ei võnku, liigutades kaamerat mööda täpset trajektoori. Samuti on olemas suur paigaldusvahemik, mis tagab statiivipeade ja kaamerate valiku paindlikkuse, ning funktsioonid hõlpsaks transportimiseks ja seadistamiseks.
1.1. Robotkäsi V8 roboti ülevaade
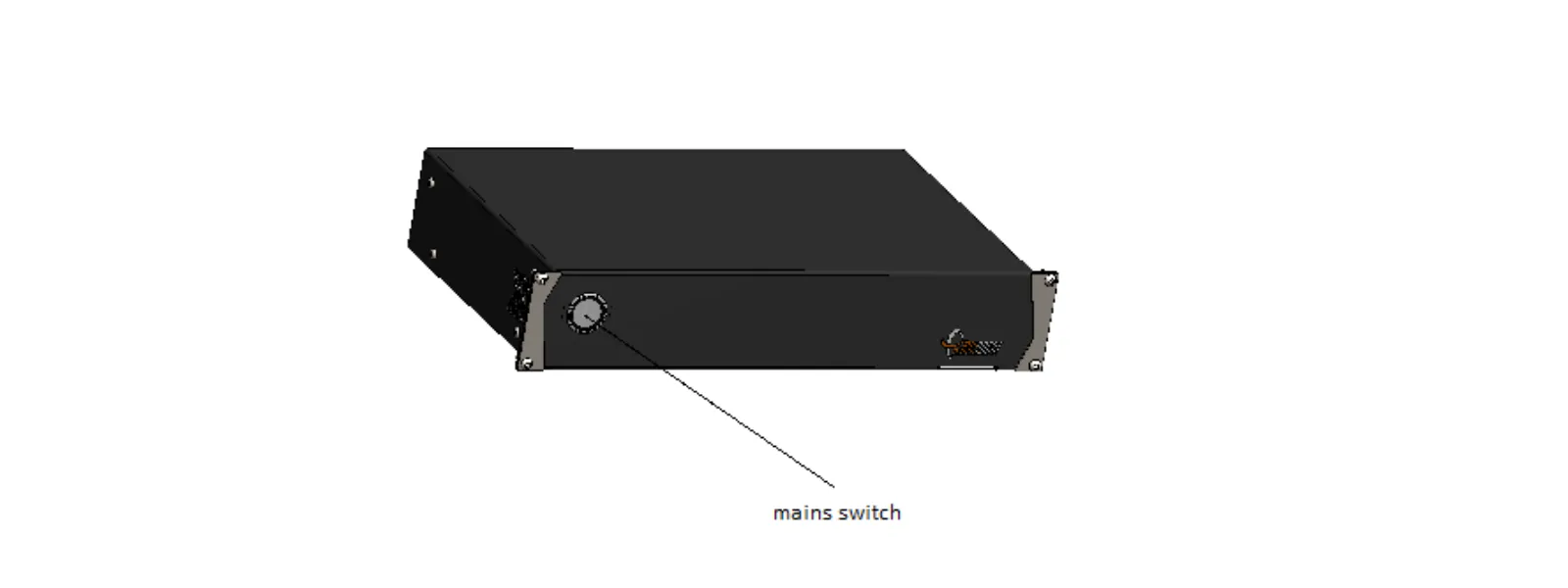
Robotkäe seadet juhitakse juhtseadme kaudu. See tähendab, et juhtseade lülitab sisse ja juhib kogu _Arm V8 liikumist.

Märkus: Juhtplokk ei ole selle seadme füüsiline osa. See paigaldatakse füüsiliselt keskmeta lauale, kui see tarnitakse koos. Kui Arm V8 tarnitakse eraldi, asetatakse juhtplokk spetsiaalsesse PhotoRobot HD rack-kohvrisse.
1.2. Elektriühendus
Robotkäsi V8 ohutuks paigaldamiseks ja kasutamiseks peavad olema täidetud ka järgmised elektriühenduse nõuded.
- Seade peab olema maandatud.
- Kasutage alati õigesti paigaldatud põrutuskindlat pistikupesa.
- Veenduge, et andmesildil olev elektriline teave vastab toiteallikale. Kui see nii ei ole, võtke ühendust elektrikuga.
- Ärge kahjustage toitepistikut ega toitekaablit.
- Ühendage toitepistik pistikupessa alles paigalduse lõpus. Veenduge, et pärast paigaldamist oleks juurdepääs toitepistikule.
- Ärge puudutage toitekaablit ega toitepistikut märgade kätega.
- Ärge tõmmake seadme lahtiühendamiseks toitekaablist. Vajutage alati kõigepealt juhtseadme toitelülitit.
- Ärge lähenege _Arm V8-le liikumise või sisselülitamise ajal.
- Pidage alati meeles selle seadme tööpiirkonda.
- Lifti ulatus on 32 cm.
- Õõtshoova vahemik on 0 kuni 90 kraadi.
Tähtis: Esimese paigalduse pärast tootja tarnimist tohib läbi viia ainult PhotoRobot volitatud asutus. Asutus peab olema volitatud turustaja või tootja ise. Isepaigaldamise ja hooldamise kohta vaadake alati enne jätkamist ka PhotoRobot'i ohutusteavet ja juhiseid.
2. _Arm V8 ettevalmistamine tööks
2.1. Vastavalt pakutavale konfiguratsioonile võib olla üks lühike vars, üks pikk vars või mõlemad.
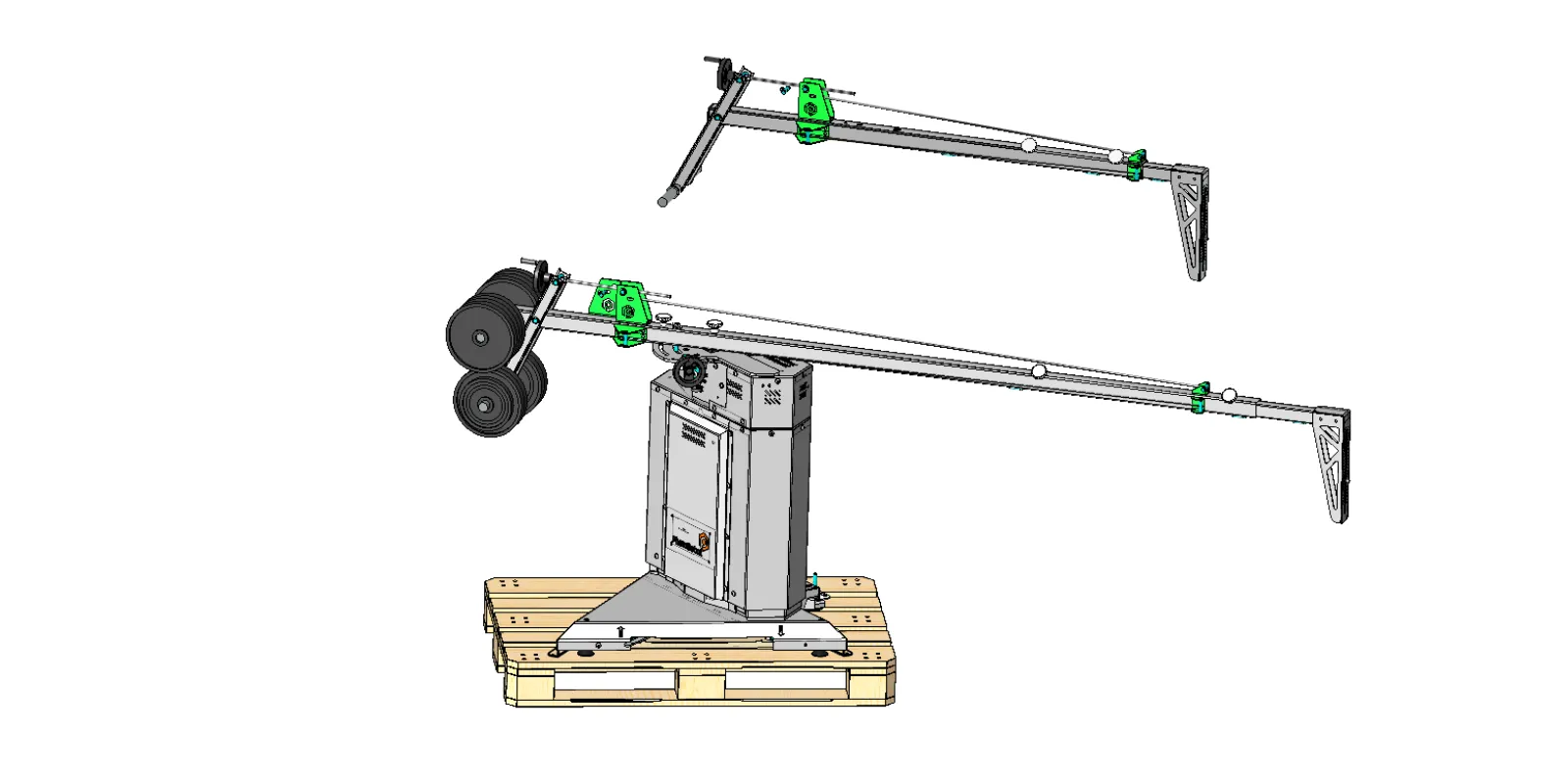
2.2. Pakkige kõik osad lahti ja eemaldage alus paletist.
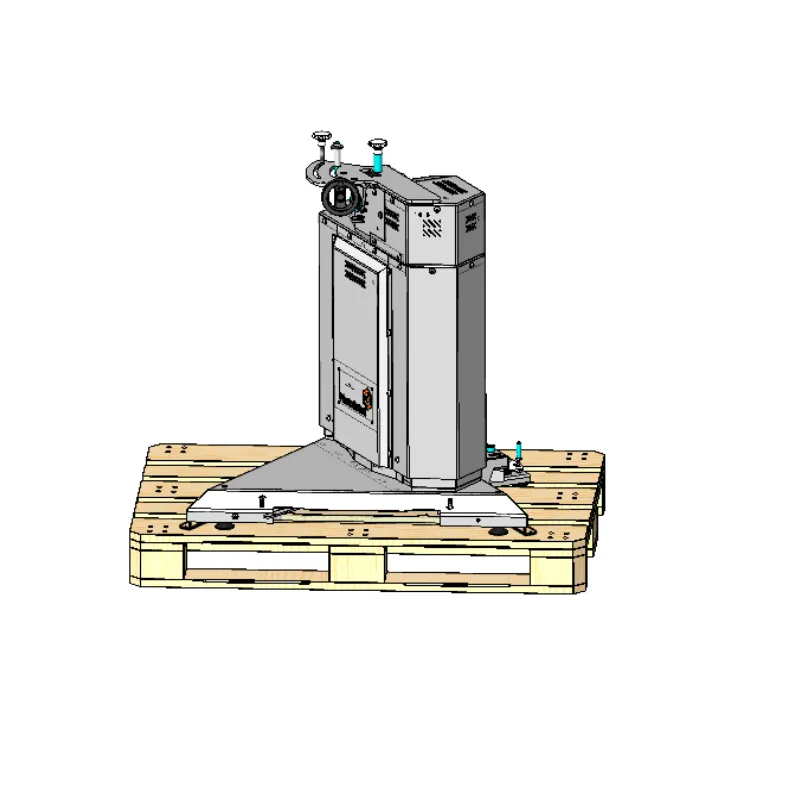
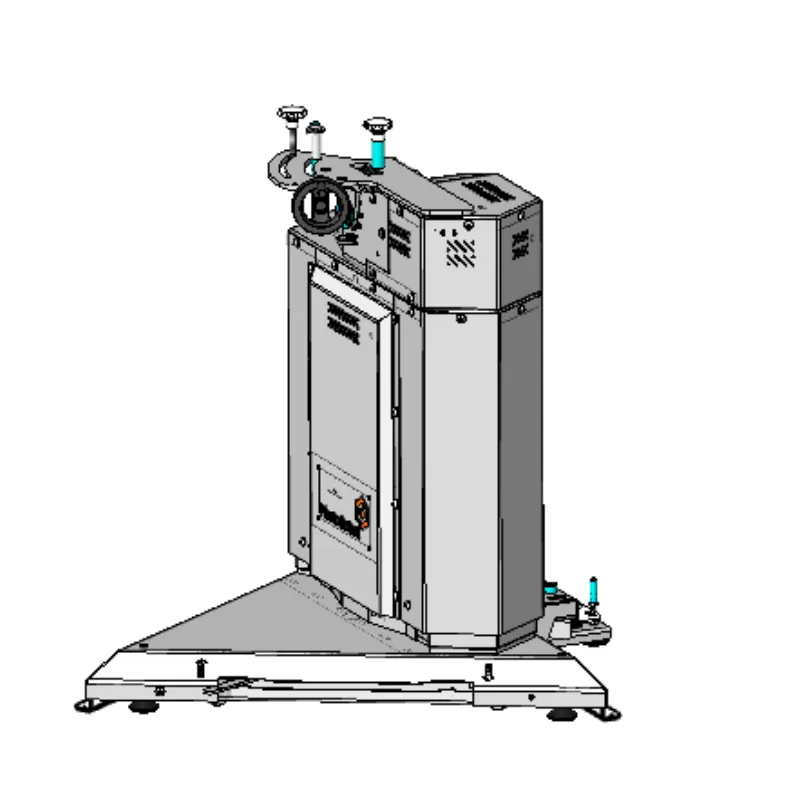
2.3. Konfigureerige _Arm V8 ülemine osa varre paigaldamiseks. Eemaldage kinnitustarvikud, nagu mutrid ja seib.
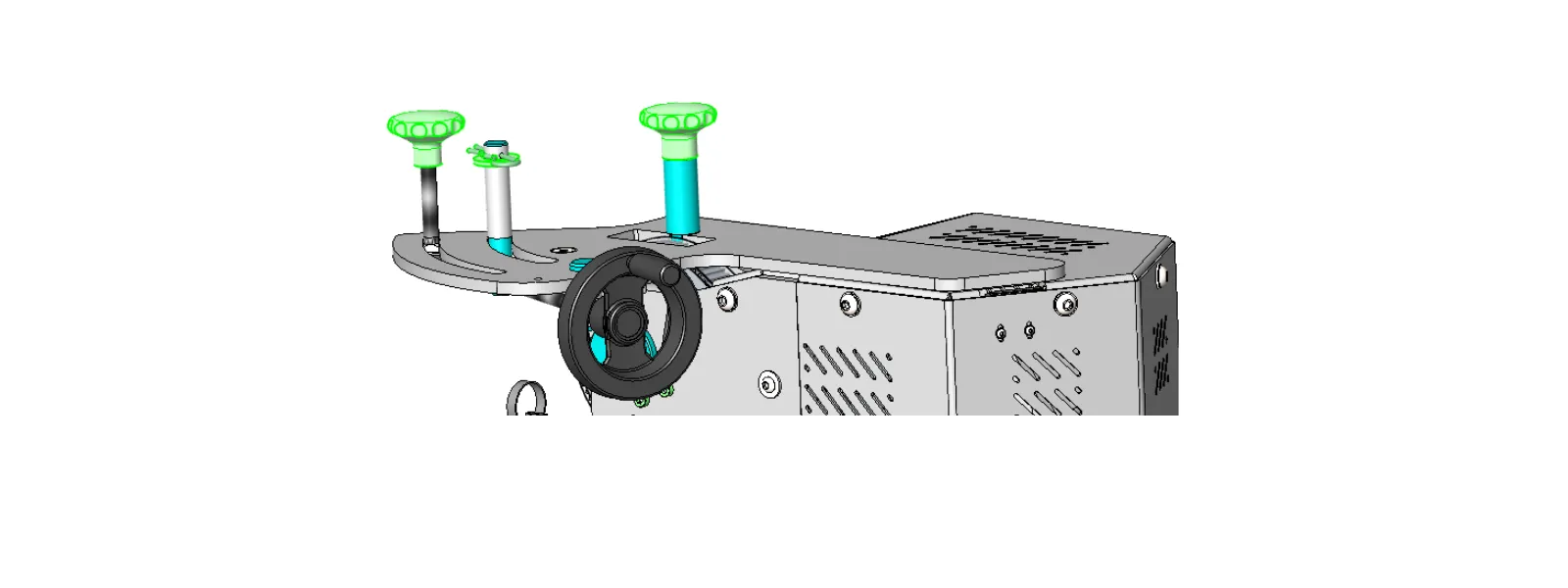
2.4. Asetage vars käe alusele ja kinnitage kõik kaitseosad.
2.5. Võtke Manfrotto hammasrattaga pea välja ja valmistage see ette käe külge kinnitamiseks.

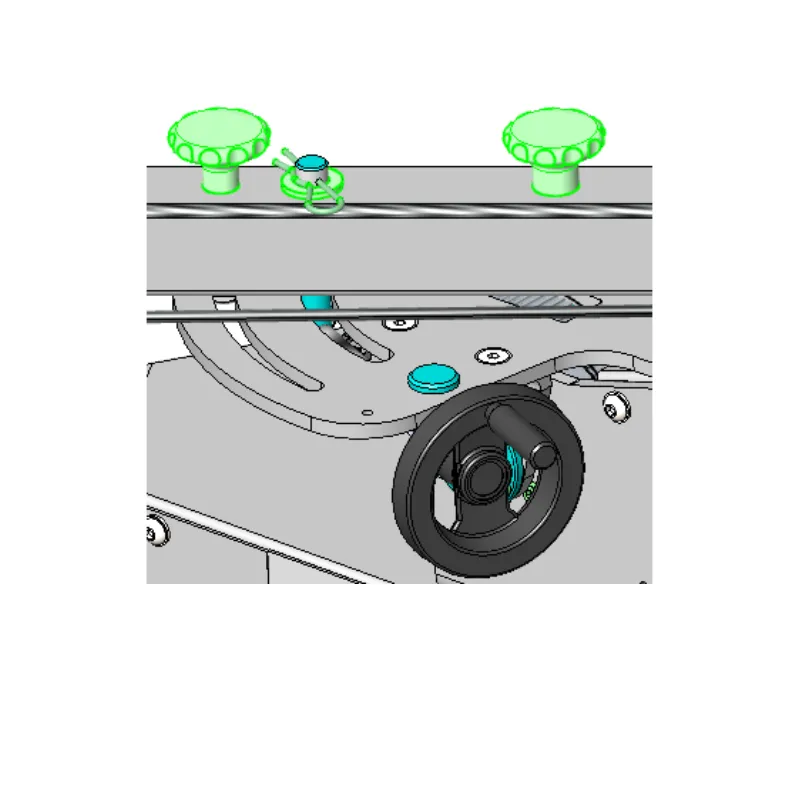
2.6. Kinnitage Manfrotto hammasratas, keerates selle varre külge, ja seejärel tasandage see reguleeritavate käepidemete 1,2,3 abil.

2.7. Paigaldage kaamera Manfrotto hammasrattaga peale ja lisage mõned raskused varre vastasküljele. Need kaalud peaksid kompenseerima kaamera kaalu.
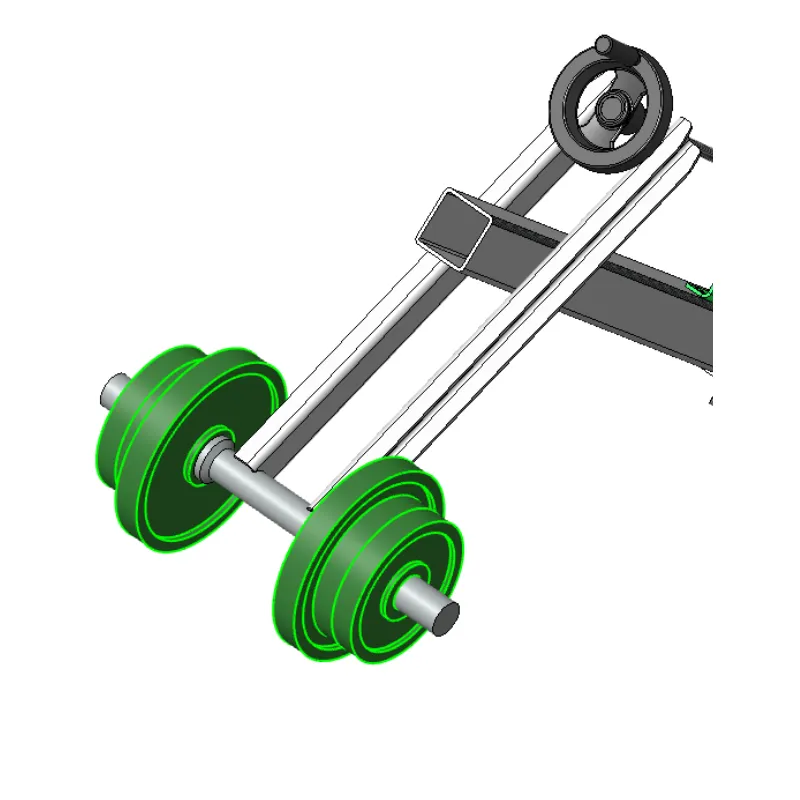
2.8. Pange tähele, et kaamera kaal peaks olema veidi ülekaalus, et vajutada lõpplülitit, kui õõtshoob on alumises asendis (null kraadi).
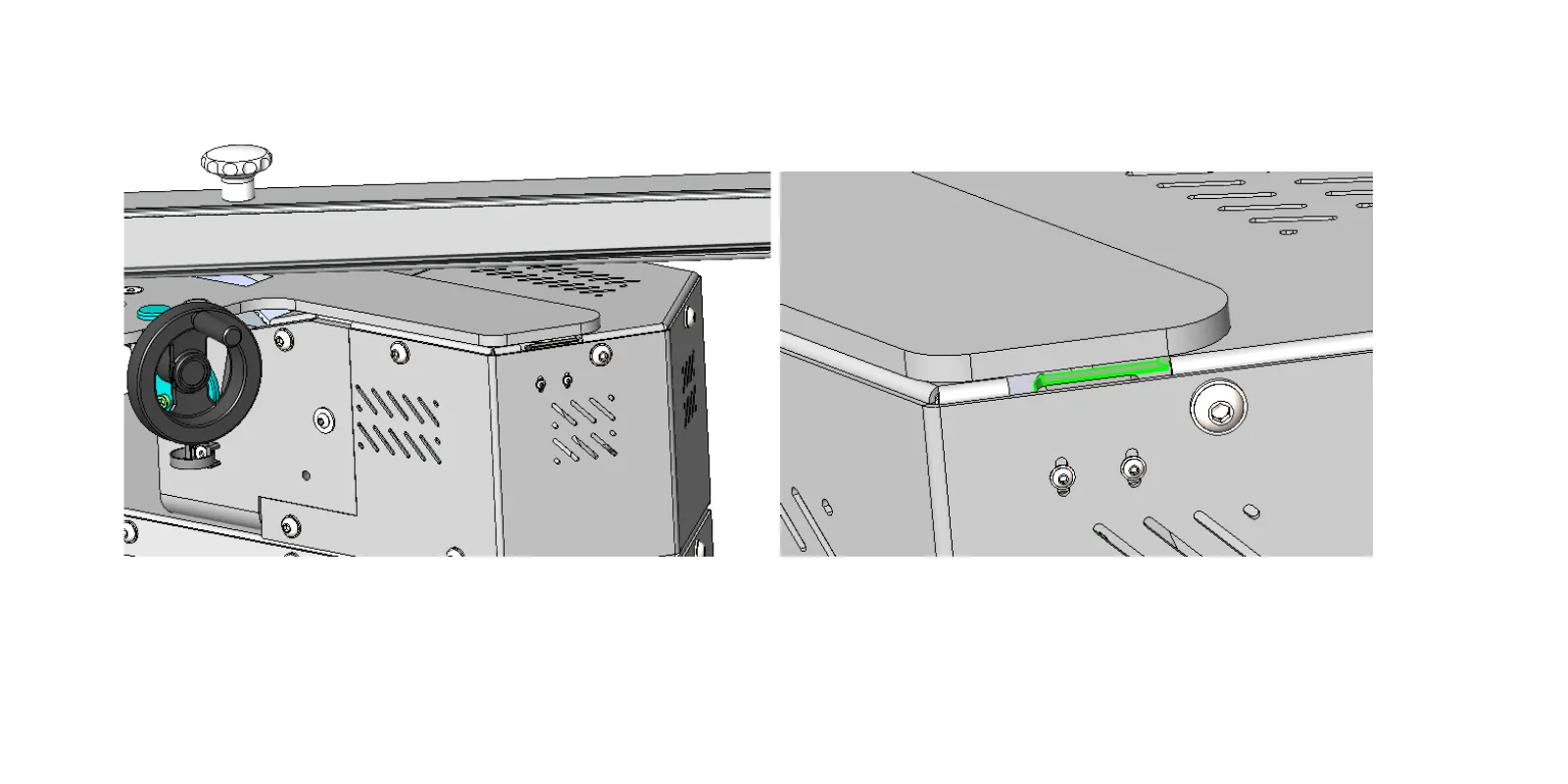
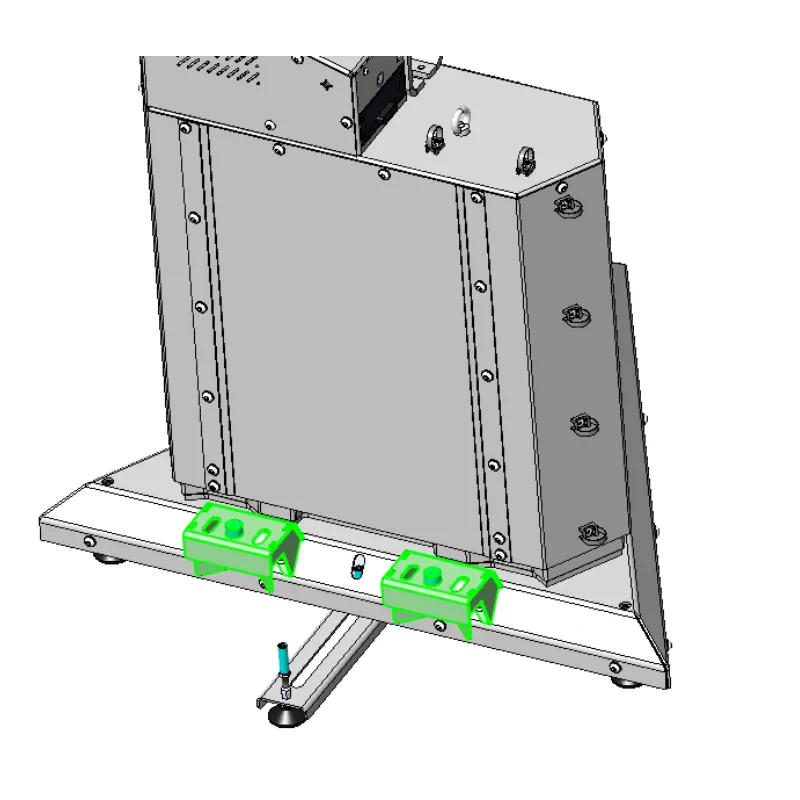
2.9. Paigaldage kaks dokkimismehhanismi osa _Arm V8-le.
3. PhotoRobot esmakordne kasutamine
Enne esmakordset kasutamist mõista selle lahenduse kontseptsiooni. PhotoRobot on revolutsiooniline kõik-ühes seade fotograafia automatiseerimiseks. Tehnilisest vaatepunktist on tegemist modulaarse üksusega, mis koosneb riist- ja tarkvarast. Eeldatakse, et PhotoRobot ise on ühendatud samasse võrku arvutiga, mis seda juhib.
Tähtis: Tehniliste töötingimuste ja juhiste saamiseks PhotoRobot võrguga ühendamiseks vaata alati PhotoRobot First Use & Basic Testing.
Üldiselt tuleb täita järgmised eeltingimused.
- Kohalikku võrku peab olema ühendatud PhotoRobot juhtseade.
- Arvuti on vajalik teenuse GUI või operaatori tarkvara nimega _Controls käitamiseks.
- Arvuti peab olema ühendatud PhotoRobot juhtseadmega samasse võrku.
- Võrk peab olema Internetiga ühendatud.
Kontrollige elektrijaotussüsteemi parameetreid, nt pinget ja sagedust.
Ühendage juhtseade Etherneti kaabli abil võrku. RJ45 pistik asub juhtseadme tagaküljel. Võrgu põhinõuded on järgmised:
- DHCP-serverit võrgus oodatakse.
- TCP-pordid 7777, 7778 side peab olema lubatud.
- UDP-levid pordis 6666 peavad olema lubatud.
- Vaja on Interneti-ühendust.
- *. photorobot.com juurdepääs peab olema lubatud.
- as-unirobot.azurewebsites.net juurdepääs peab olema lubatud.
- Vajadusel lisateabe saamiseks vaadake jaotist PhotoRobot Üksikasjalikud võrgu eeltingimused.
- Ühendage toitepistik pistikupessa.
Vajutage juhtseadme esipaneelil olevat toitelülitit. Kui see muudab oleku vilkuvast tulest püsivaks tuleks, on see töövalmis.
3.1. Leidke PhotoRobot'i IP-aadress LAN-ist
PhotoRobotsi võrgust otsimiseks on saadaval tugirakendused.
- Windows - frfind Windowsi jaoks
- Mac OS X - frfind macOS-i jaoks
- Android – PhotoRobot Locator teenuses Google Play
- iPhone, iPad – PhotoRobot Locator iTunesis
3.2. Põhiline PhotoRobot testimine
Avage arvutis veebibrauser ja sisestage PhotoRobot IP-aadress URL-vormingus, näiteks: https://11.22.33.44 (pidage meeles, et see aadress on vaid näide – sisestage ülaltoodud jaotisest leitud IP-aadress).
Kui kõik töötab ootuspäraselt, näete põhilist kasutajaliidest, mis sarnaneb allolevale graafikule:

Lülitage mootorid sisse (nool 1) ja proovige juhtida roboti mis tahes liikuvat osa (nool 2). Kui robot liigub vastavalt teie juhistele, olete valmis oma PhotoRobot seadet regulaarselt kasutama.


EOS Rebel seeria


EOS DSLR-seeria


EOS M peeglita seeria


PowerShot seeria


Lähivõte / käeshoitav

Canon EOS Rebel seeria pakub algajasõbralikke digipeegelkaameraid, millel on kindel pildikvaliteet, intuitiivsed juhtnupud ja mitmekülgsed funktsioonid. Need kaamerad, mis sobivad ideaalselt fotograafiahuvilistele, pakuvad usaldusväärset autofookust, muudetava nurgaga puuteekraane ja Full HD või 4K videosalvestust.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS digipeegelkaamerate seeria pakub kvaliteetseid pilte, kiiret automaatteravustamist ja mitmekülgsust, muutes selle ideaalseks nii fotograafia kui ka videote tegemiseks.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS M peeglita seeria ühendab kompaktse disaini digipeegelkaameraga sarnase jõudlusega. Vahetatavate objektiivide, kiire autofookuse ja kvaliteetsete pildianduritega kaamerad sobivad suurepäraselt reisijatele ja sisuloojatele, kes otsivad kaasaskantavust ilma pildikvaliteeti ohverdamata.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni PowerShoti seeria pakub kompaktseid ja kasutajasõbralikke kaameraid juhuslikele pildistajatele ja entusiastidele. Mudelid, mis ulatuvad lihtsatest sihi-ja-pildista kuni täiustatud suumkaamerateni, pakuvad mugavust, kindlat pildikvaliteeti ja selliseid funktsioone nagu pildistabilisaator ja 4K-video.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni lähivõtete ja käeshoitavad kaamerad on loodud üksikasjalikeks, lähedalt pildistamiseks ja videote tegemiseks. Kompaktsed ja hõlpsasti kasutatavad need pakuvad täpset teravustamist, kõrge eraldusvõimega pildistamist ja mitmekülgseid makrofunktsioone – ideaalsed vlogimiseks, tootepildistamiseks ja loomingulisteks lähivõteteks.


