PhotoRobot Cube V5 / V6 / kompaktne kasutusjuhend
See kasutusjuhend sisaldab tehnilisi juhiseid PhotoRobot Cube V5 / V6 / Compacti paigaldamise, ühendamise ja kasutamise kohta. See sisaldab juhiseid Cube'i roboti paigaldamiseks pöörleva mannekeeni torso hoidjana. Käsiraamatu eesmärk on toetada PhotoRobot kliente nende seadme kokkupanekul, selle esmakordsel kasutamisel ja tootmisliini operaatorite kaasamisel.

Märkus: PhotoRobot seadme esmakordse paigaldamise peab alati läbi viima volitatud PhotoRobot asutus. PhotoRobot paigaldamiseks loaga asutused on heakskiidetud edasimüüja või tootja enda esindaja.
Tähtis: Enne isepaigaldamist või esmakordset kasutamist vaadake alati PhotoRobot'i ohutusteavet ja juhiseid lisaks spetsiaalselt seadmega kaasas olevale juhendile.
Kuubik V5 / V6 / Kompaktne esmane kasutamine ja paigaldamine
Täname ja õnnitleme teid PhotoRobot Cube'i ostu puhul! Teie seade esindab aastakümnete pikkust professionaalset kogemust, oskusteavet ja uuendusi automatiseeritud fotograafia vallas. Iga roboti disain on mõeldud teile. Samal ajal on tarkvara pidevas arenduses – kohandades seda vastavalt ainulaadsetele vajadustele, tuues samal ajal iga värskendusega kasu kogu PhotoRobot ökosüsteemile.
Tere tulemast PhotoRobot'i. Kasutage seda Cube V5 / V6 / Compact PhotoRobot tehnilist dokumentatsiooni, et tutvuda tehnoloogiaga ning saada juhiseid lahenduse kokkupaneku ja esmakordse kasutamise kohta.
1. Tootekirjeldus - Kuubik V5 / V6 / Kompaktne
PhotoRobot Cube V5 / V6 / Compact seadmed on üks mitmekülgsemaid fotostuudio roboteid. Iga kuubik on võimeline töötama eraldiseisvalt või koos teiste PhotoRobot'idega ning sellel on konfiguratsioonid 3 erineva töörežiimi jaoks. Kuubik toimib pöörleva fotoplatvormina, objekti riputusrežiimis ja pöörleva mannekeeni torso hoidjana.

PhotoRobot Cube'i põhifunktsioonid on järgmised:
- Eraldiseisev kasutamine või kasutamine koos ühilduvate PhotoRobot'idega
- Kiire seadistamine 360-kraadise plaadimängijana või objekti riputusrežiimis
- Tugi mannekeeni torso hoidjale või pöörlevale platvormile
- Ühildub erinevat tüüpi ja suurusega fotograafia mannekeenidega
- Saadaval Cube V5, V6 ja Compact versioonidena suurema mitmekülgsuse tagamiseks
1.1. Seadme ülevaade - Cube V5 / V6 / Compact
PhotoRobot's Cube V5, Cube V6 ja Cube Compact töötavad kolmes erinevas konfiguratsioonis. Standardkonfiguratsioonid hõlmavad seadme kasutamist pöörleva fotograafiaplatvormina või objektide õhus riputamiseks fotode tegemiseks. Teise võimalusena on võimalik seadet seadistada mannekeeni torso paigaldamiseks pöörlevaks aluseks.
a) 360 foto / pöörleva platvormi seadistamine:

b) 360 / pöörleva vedrustuse režiim:

c) Pöörlev mannekeeni torso hoidja:

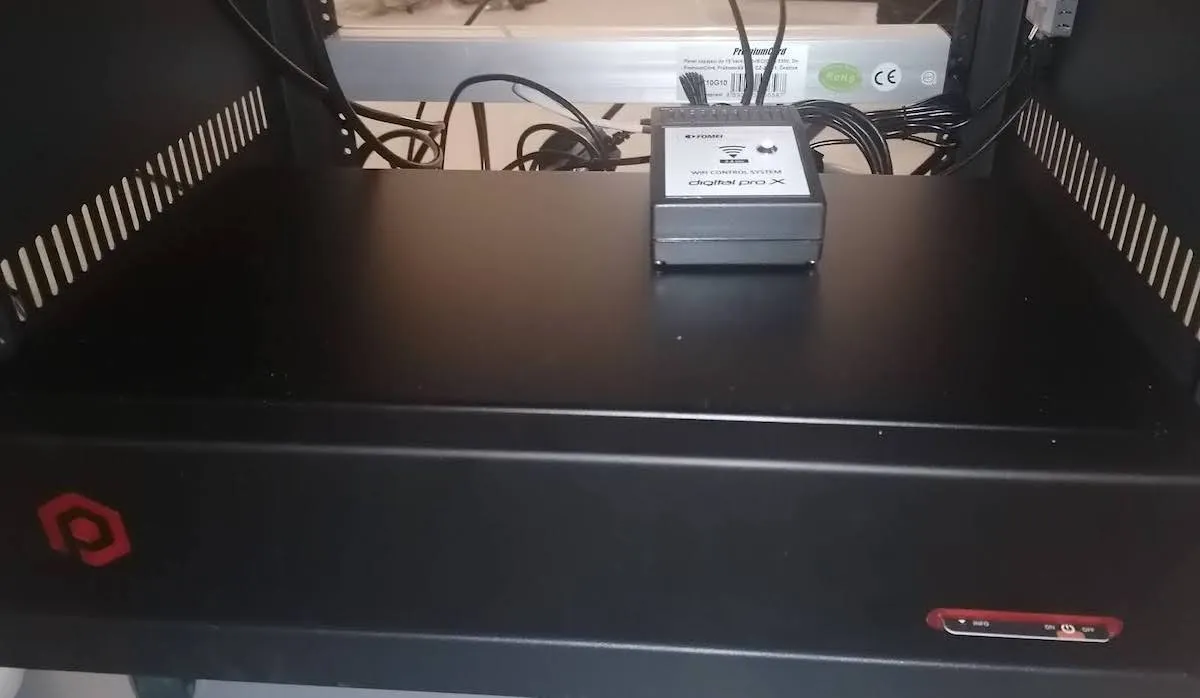
Märkus: Cube V5 ja Cube V6 juhtplokk on seadmete eraldiseisev, kuid lahutamatu komponent. Cube Compactil on masinasse integreeritud juhtseade.
- Ülaltoodud pildil on Cube V5 / Cube V6 juhtplokk.
1.2. Kuubiku kompaktsed tehnilised parameetrid
Cube Compacti jaoks on järgmised tehnilised parameetrid.
- Kaal: 26.21 kg
- Mõõdud: 337,5 x 373,5 x 209,5 mm
- Toide: 100 - 230 V, 50 HZ, kaitse T1.6 A (230 V), T3.15 A (115 V)
- Kandevõime: 130 kg nii alumisel kui ka ülemisel paigaldusel
- Väljundvõlli pöördemoment: 143,5 Nm
- Kiirus: 0 -17 1.min-1
1.3. Cube kompaktsed tarvikud
Cube Compactil on järgmised osad ja tarvikud.
a) Riidepuu:

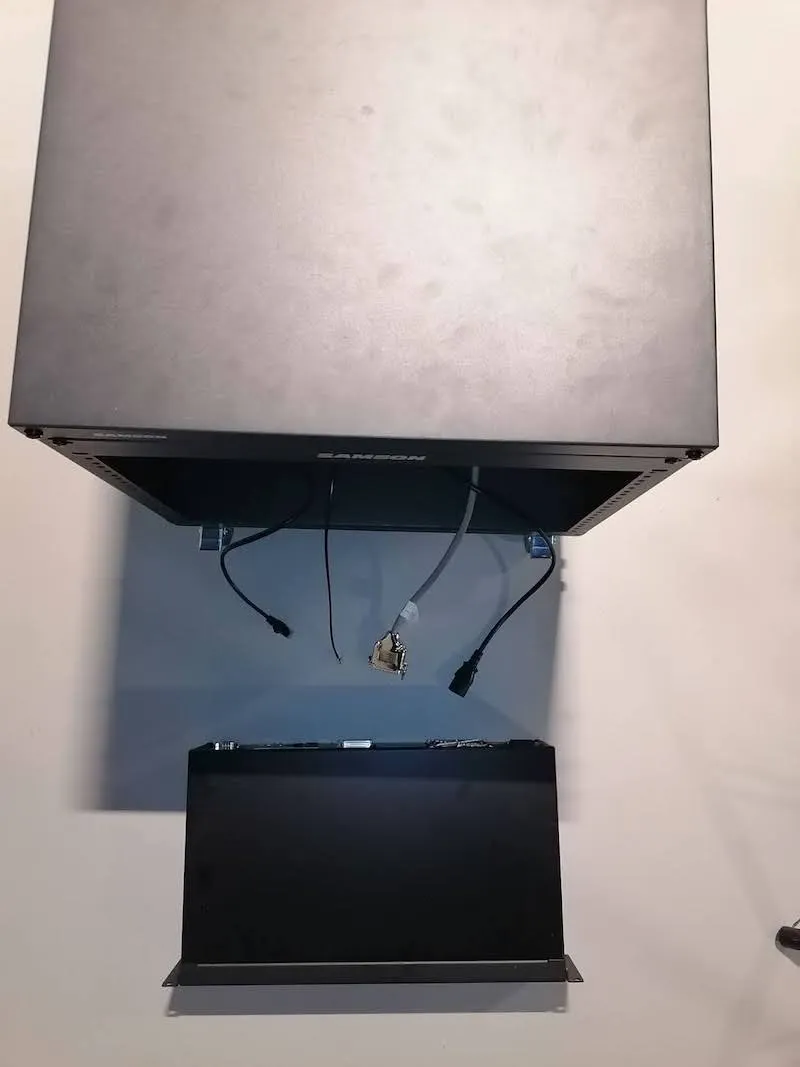
b) Alumine alus:

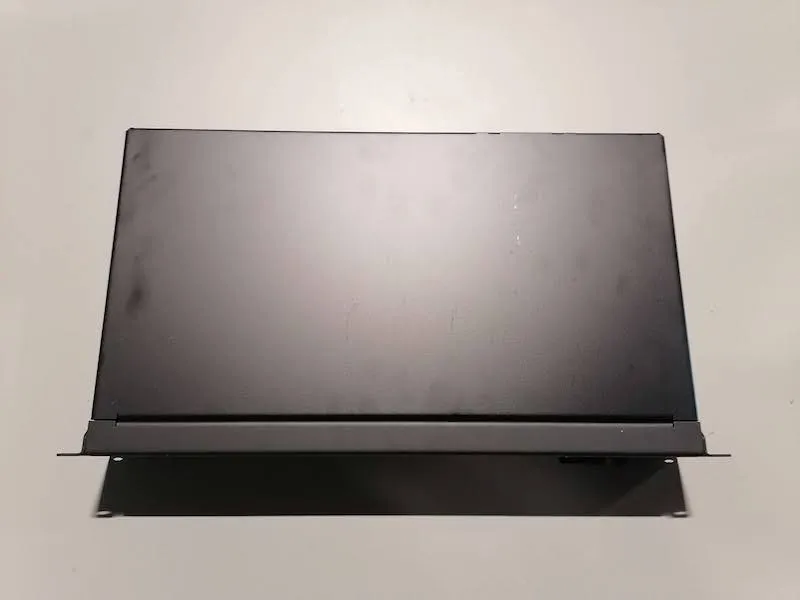
c) Ülemine alus:
d) Masina jalad:

e) Plaat:

f) Portaal:

1.4. Cube Compact paigaldamine ja kasutamine Ülevaade
Lisaks Cube Compacti tarvikutele on Cube Compacti paigaldamiseks ja kasutamiseks mitu konfiguratsiooni. Nende hulka kuuluvad järgmised konfiguratsiooniosad ja seadistused.
a) Alumine kinnitusplaat (seadme pöördlaua või kinnitussüsteemi kinnitamiseks):
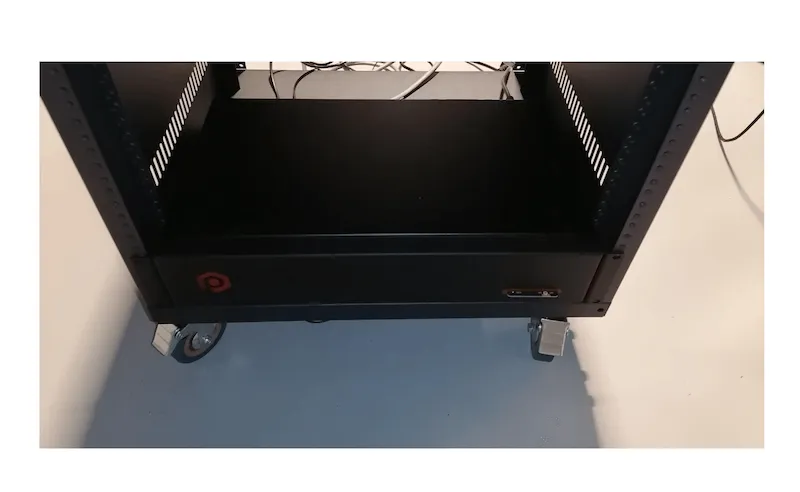
b) Kinnitatud eraldiseisev pöörlev platvorm (suurema stabiilsuse tagamiseks põranda külge kinnitatud):


Märkus: Selles konfiguratsioonis on 95 cm plaat, millel on aluskinnitus stabiilsele põrandapinnale. See stabiliseerib masinat kasutamise ajal ja hoiab ära ümbermineku. Selle kasutusjuhtumite hulka kuuluvad väikeste ja keskmise suurusega objektide esitlemine maksimaalselt 60–65 cm.
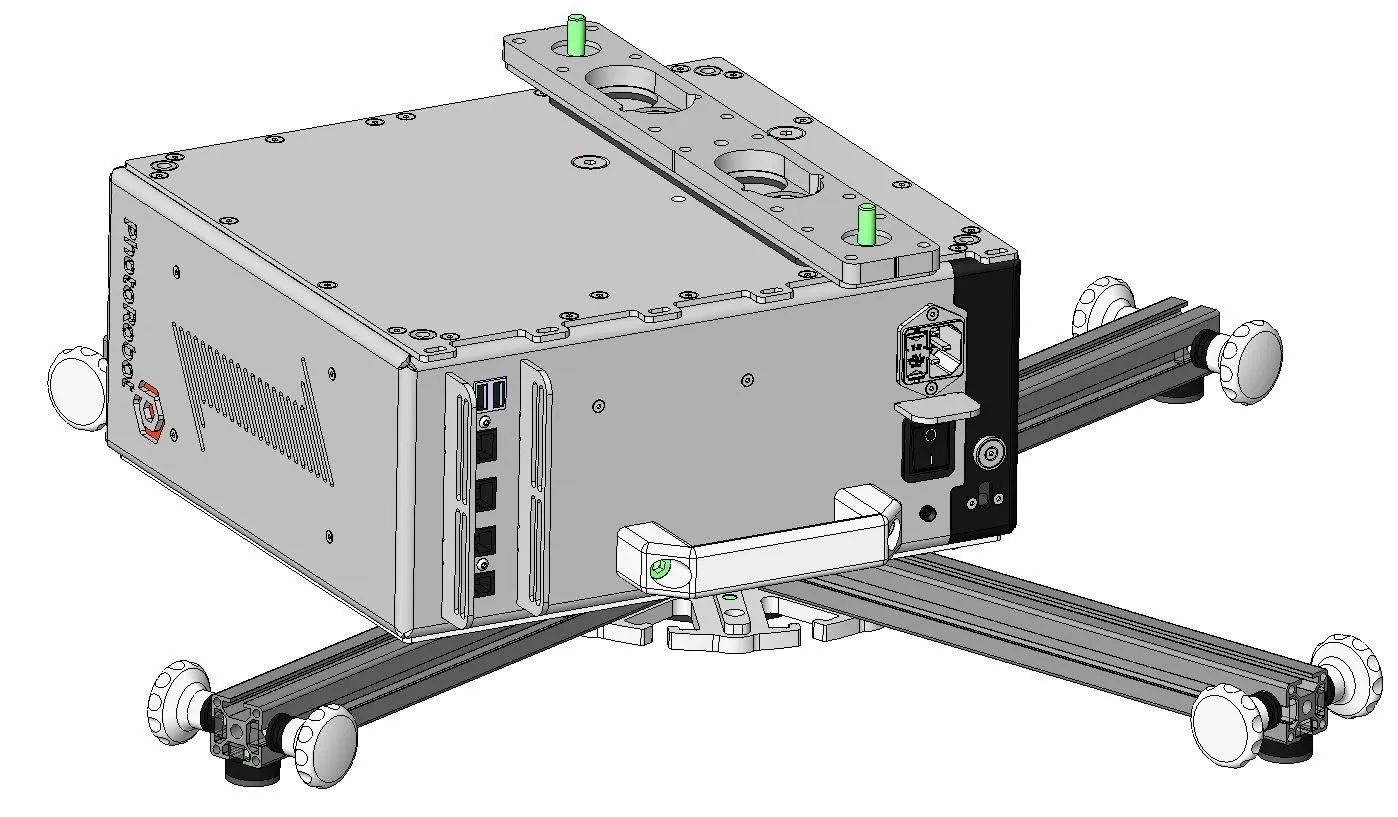
c) Eraldiseisev pöörlev platvorm (seadme jalgadega):
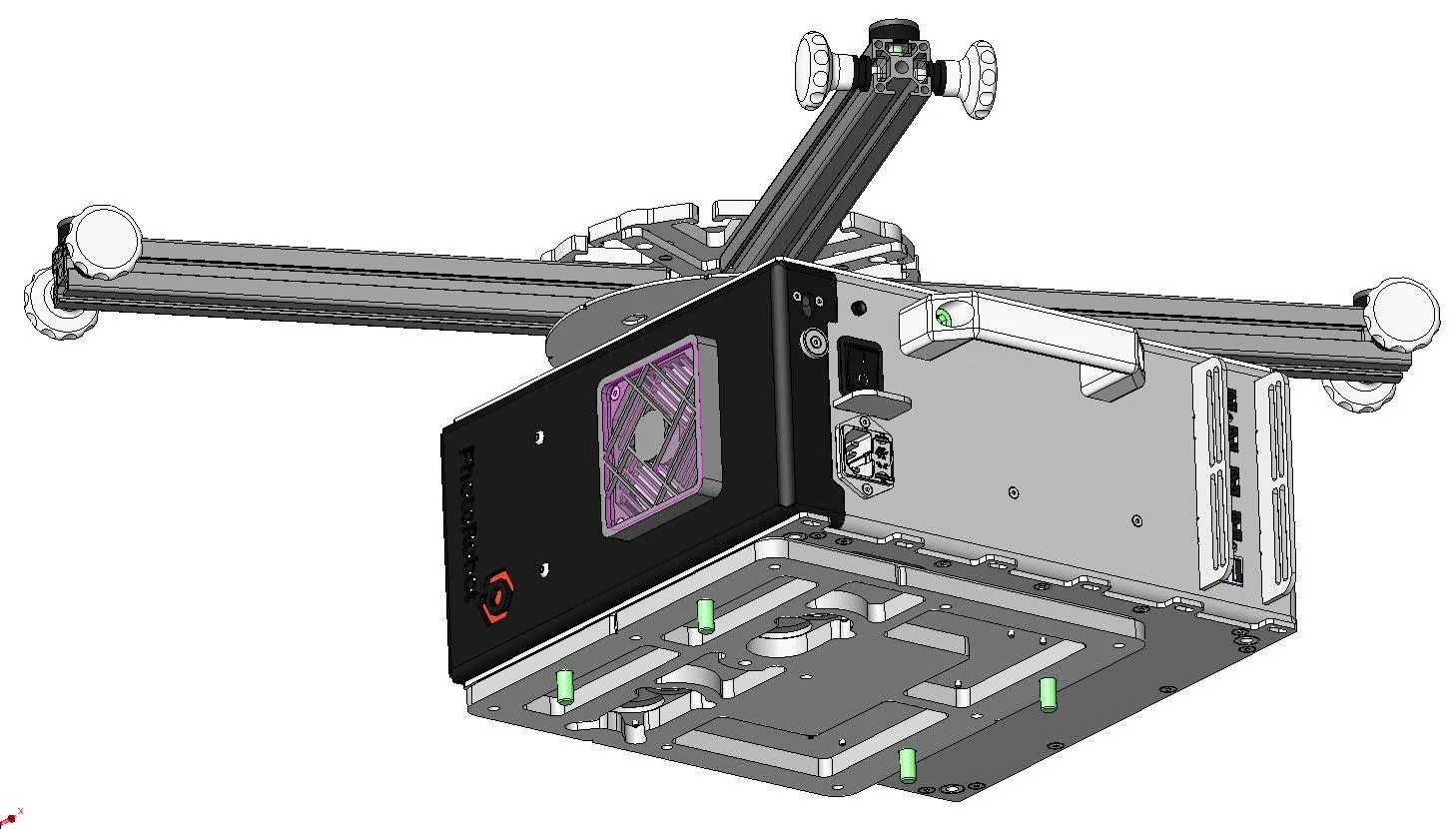
d) 360 pöörlev vedrustusrežiim (tagurpidi paigaldamine ülemise portaali külge):




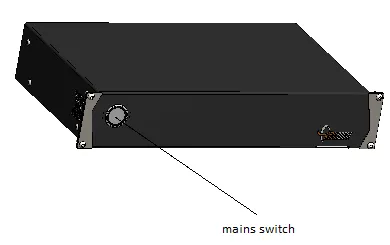
1.5. Cube kompaktne hädaseiskamine
Hädaseiskamiseks ühendage seade elektrivõrgust lahti, tõmmates toitejuhtme pistikupesast.
1.6. Kuubik V5 / V6 / kompaktne hooldus
Pange tähele, et seadet on vaja hoida puhtana ja kuivas, kontrollitud kliimaga keskkonnas, kus on püsiv temperatuur. Eemaldage tolm ainult reklaamigaamp lapiga ja ärge kasutage puhastamiseks kemikaale ega lahusteid.
Konstruktsiooni järgi tuleb seadmeid regulaarselt kontrollida ja üle vaadata vastavalt kohalikele õigusaktidele. Pärast elutsükli lõppu tuleb elektriseadmed nõuetekohaselt utiliseerida, andes need üle kohalike õigusaktidega ette nähtud elektroonilisele jäätmekogumissüsteemile.
2. Esmakordne kasutamine - PhotoRobot Cube V5 / V6 / Compact
Enne PhotoRobot esmakordset kasutamist on vaja mõista tehnoloogia taga olevat kontseptsiooni. PhotoRobot on revolutsiooniline kõik-ühes lahendus toote- ja objektifotograafia automatiseerimiseks. Tehnilisest vaatenurgast on see riist- ja tarkvarast koosnev modulaarne seade. Seetõttu on vaja, et PhotoRobot ise oleks ühendatud sama võrgu kaudu kui seda opereeriv arvuti. Pilves töötavatele PhotoRobot teenustele juurdepääsuks peab võrgul olema ka Interneti-ühendus. Seejärel on alati täidetud järgmised nõuded.
- Kohalikku võrku peab olema ühendatud PhotoRobot juhtseade.
- Arvuti on vajalik teenuse GUI või operaatori tarkvara nimega _Controls käitamiseks.
- Arvuti peab olema ühendatud PhotoRobot juhtseadmega samasse võrku.
- Võrk peab olema Internetiga ühendatud.
Pärast PhotoRobot'i arvuti ja kohaliku võrguga ühendamise tagamist kontrollige elektrijaotussüsteemi parameetreid (nt pinge ja sagedus).
Seejärel kontrollige juhtseadme toiteseadet. See peab vastama kõigile elektrijaotussüsteemi parameetritele. Kui juhtseadme seadistus ei vasta nõuetele, vaadake järgmist jaotist Juhtseadme toite seadistamine.
Kui see on ühilduv, ühendage juhtseade Etherneti kaabli kaudu võrku.
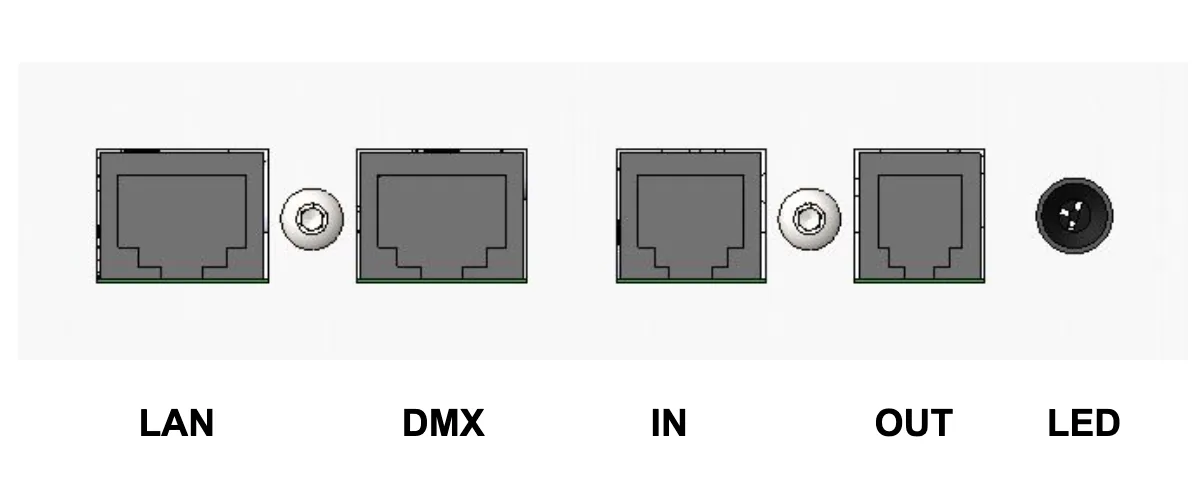
Märkus: Cube V5 / V6 mudelite puhul on juhtplokk eraldi seade. Leidke juhtseadme tagaküljelt RJ45 pistik. Cube Compactil on masinasse integreeritud juhtplokk. Leidke Cube'i roboti tagaküljelt RJ45 pistik.
2.1. Juhtseadme toite seadistamine
Juhtseadme toiteseadistuse kontrollimiseks on vanema mudeli juhtseadmel käsitsi voltage valija seadme tagaküljel.

Teise võimalusena pole uuema mudeli juhtseadmel pingevalijat ja selle töövahemik on 110–240 V.
Kui te pole juhtseadme toite seadistuses kindel, võtke PhotoRobot'i spetsialisti abi saamiseks ühendust PhotoRobot'i tehnilise toega.
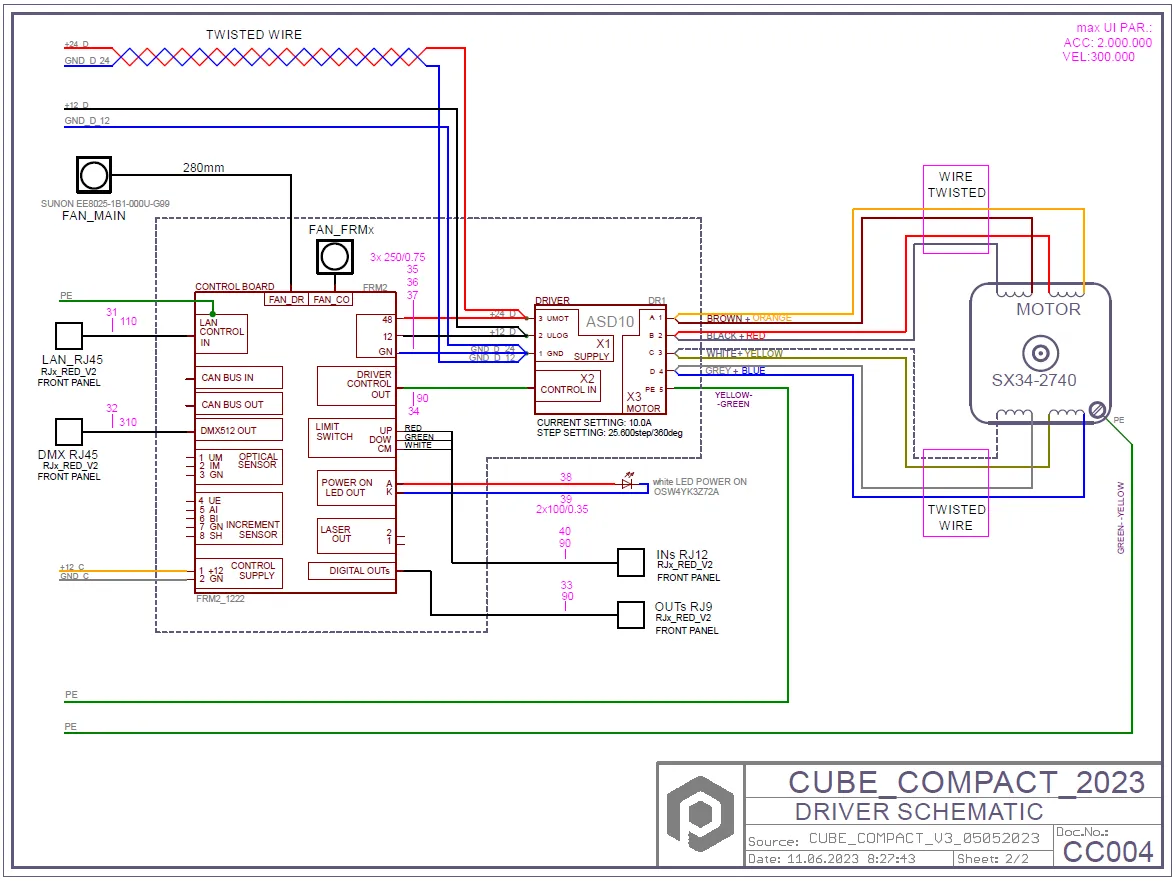
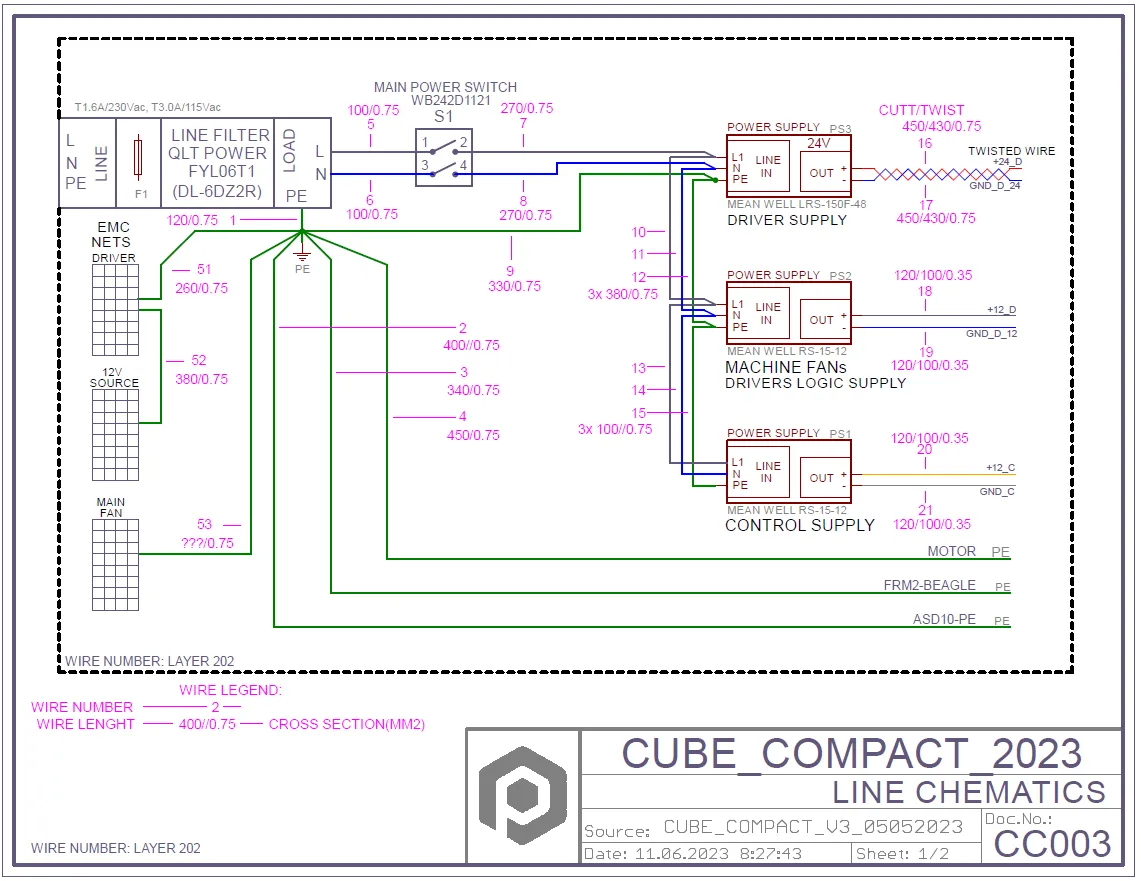
2.2. Kuubiku kompaktne elektriskeem
2.3. Võrgu konfiguratsioon
Võrgu konfigureerimiseks PhotoRobot'iga õigeks suhtlemiseks peavad võrgus olema täidetud järgmised nõuded.
- DHCP-server võrgus on kohustuslik.
- TCP-pordid 7777, 7778 side peab olema lubatud.
- UDP-edastused pordis 6666 peavad olema lubatud
- Internetiühendus on kohustuslik.
- *. photorobot.com juurdepääs peab olema lubatud.
- as-unirobot.azurewebsites.net juurdepääs peab olema lubatud.
- Soovitatav on PhotoRobot juhtmega ühendada LAN-iga.
- Vajadusel lisateabe saamiseks vaadake jaotist PhotoRobot Üksikasjalikud võrgu eeltingimused.
- Ühendage toitepistik pistikupessa.
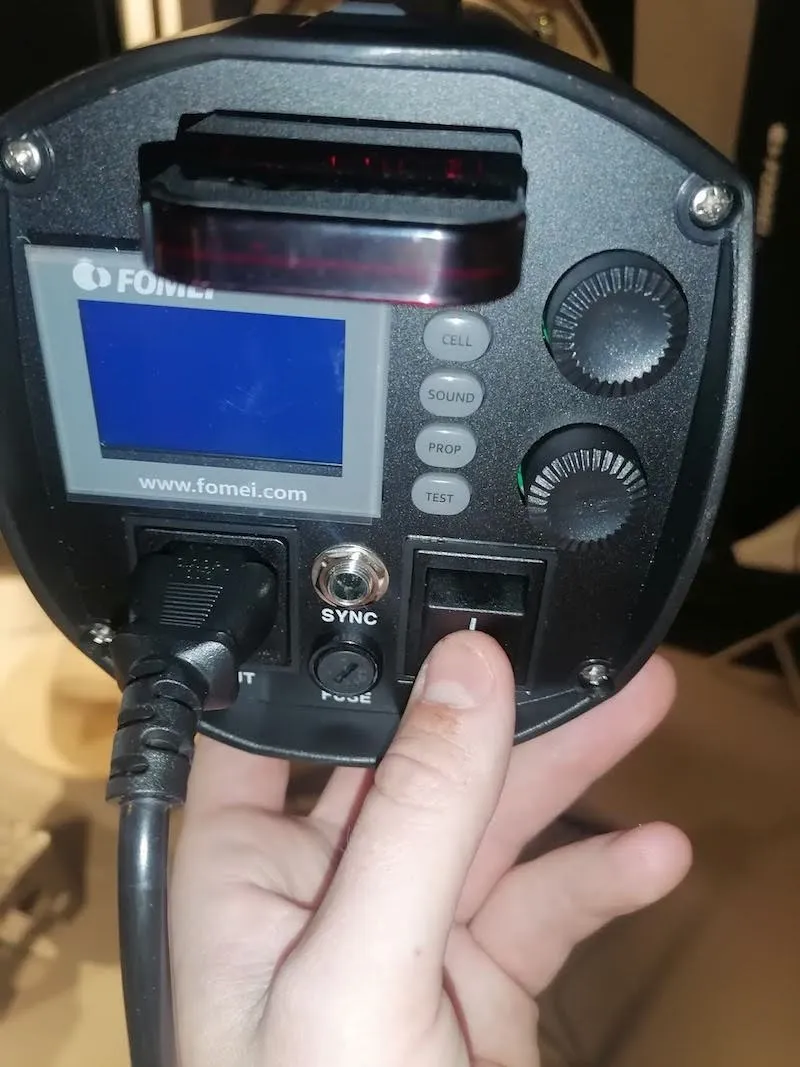
Järgmisena vajutage Cube V5 / V6 juhtseadme (või Cube Compacti tagaküljel) toitelülitit. Olekutuli muutub vilkuvast pidevaks valguseks, et anda märku, kui see on töövalmis.
2.4. Leidke PhotoRobot'i IP-aadress LAN-ist
Pärast võrgu õiget konfigureerimist on vaja otsida ja tuvastada PhotoRoboti IP-aadress LAN-is. Selleks on PhotoRobot Locator rakendus integreeritud otse CAPP-i, et hõlbustada juhtseadmete otsimist ja tuvastamist võrgus. Veenduge, et kasutate selle funktsiooni kasutamiseks CAPP-i kõige ajakohasemat versiooni.
Seejärel, et tuvastada robot võrgus otse CAPP-is, avage CAPP-i kohalik versioon, minge seadetesse ja klõpsake Robotid / Juhtseadmed.

Robots / Control units menüü kuvab iga roboti kohta veerud nime, võrgu, seadme, versiooni, avastamise ja identifitseerimisega. Kui roboti nime vasakul olev punkt on roheline, on see võrgus. Roboti väljale klõpsamine avab seejärel roboti veebiliidese. See paneb ka roboti juhtseadme LED-tule roheliselt vilkuma, et seda oleks lihtsam tuvastada.
Kui klient nõuab rakenduse välist allalaadimist, on PhotoRobot Locator saadaval ka iOS-i allalaadimiseks osana PhotoRobot Account Downloads.

Märkus: PhotoRobot Locatori Androidi versioon on tootmisest eemaldatud.
Alternatiivina on olemas FRFind käsurea utiliit MacOS-i või Windowsi jaoks, et otsida võrgust ja tuvastada PhotoRobot juhtseadmeid. Lingid FRfindi allalaadimiseks leiate ka PhotoRobot konto allalaadimiste lehelt.
2.5. Põhiline testimine - Cube V5 / V6 / Compact
Cube V5 / V6 / Compacti testimiseks avage järgmisena a web brauser ja sisestage oma PhotoRobot'iga seotud IP-aadress URL-vormingus. Sisestage näiteks: https://11.22.33.44 (kuigi pange tähele, et see aadress on ainult näide). Kui see õnnestub, käivitub põhiline kasutajaliides.

- Lülitage mootorid sisse (ülaltoodud nool 1) ja proovige juhtida roboti mis tahes liikuvat osa (ülaltoodud nool 2). Kui robot liigub vastavalt teie juhistele, olete valmis oma PhotoRobot seadet regulaarselt kasutama.
3. Kuubiku V5 / V6 kokkupanek ja mannekeeni torso hoidja
Cube V5 või Cube V6 mudelite kokkupanemisel pidage meeles, et eraldi juhtseadme ja statiivi kokkupanek on vajalik. Cube Compacti puhul see nii ei ole. Kui kasutate Cube Compacti, jätkake paberi tausta kokkupaneku jaotisega.
3.1. HD-riiuli ja juhtseadme kokkupanek (V5 / V6)
3.1.1. Kuubiku V5 ja kuubiku V6 eraldi juhtploki kokkupanekuks alustage riiuli kokkupanekust. Selleks järgige kohaletoimetamise ajal riiulikarbile lisatud juhendi juhiseid.

3.1.2. Järgmisena leidke juhtplokk ja pakkige see karbist lahti.

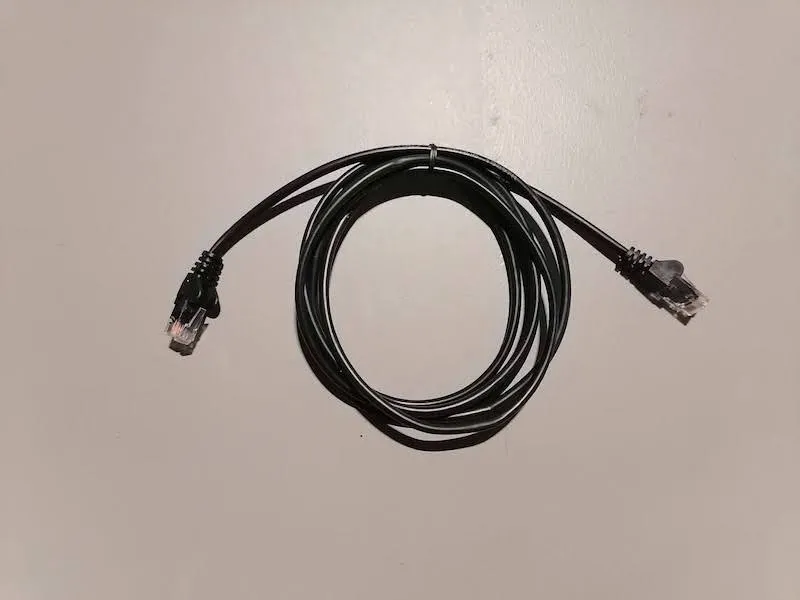
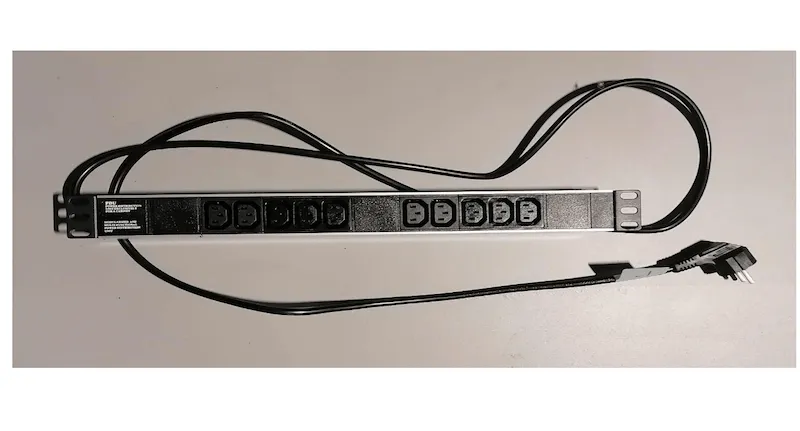
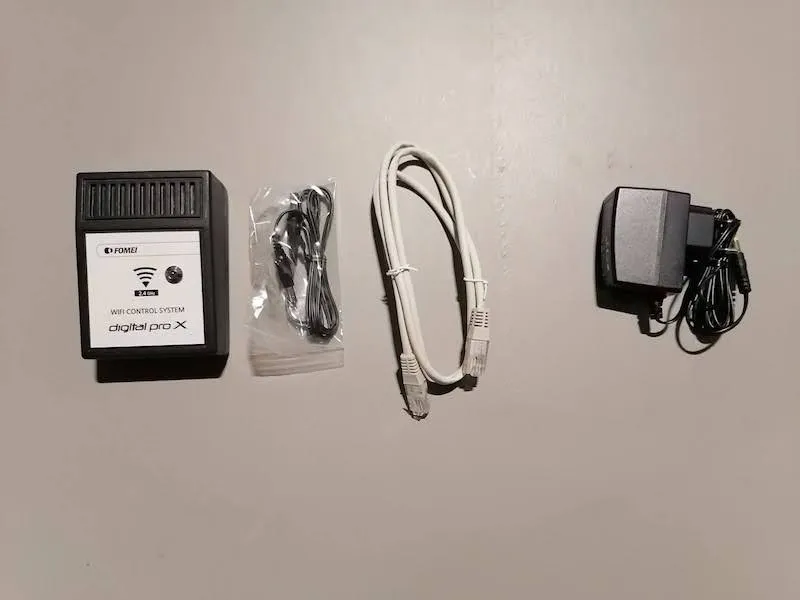
3.1.3. Seejärel valmistage ette järgmised kaablid: toitekaabel (pikkus 1 meeter), katikukaabel, mootorikaabel ja Etherneti kaabel (pikkus 2 meetrit).
a) Toitekaabel (pikkus 1 meeter):

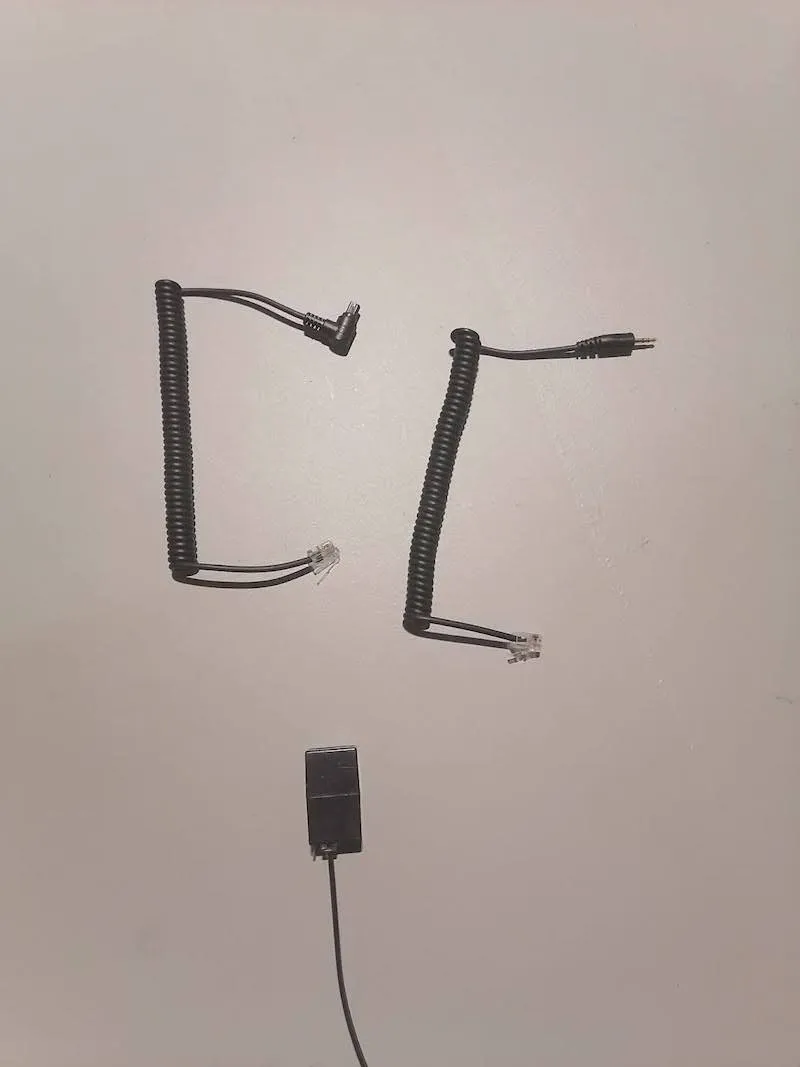
b) Katiku kaabel (pikkus 1 meeter):

c) Mootori kaabel:

d) Etherneti kaabel (pikkus 2 meetrit):
3.1.4. Asetage iga eelmises etapis ettevalmistatud kaabel restile.
3.1.5. Ühendage eelmiste sammude kaablid juhtseadmega.

Tähtis: Mootori kaabel tuleb tihedalt kinnitada pistiku kahe kruvi abil. Katikukaabel ühendub juhtploki OUT-porti.
3.1.6. Sisestage juhtplokk riiuli korpusesse ja keerake kruvid kinni, et see sulguks.
3.2. Tarvikute ja ühenduste kokkupanek
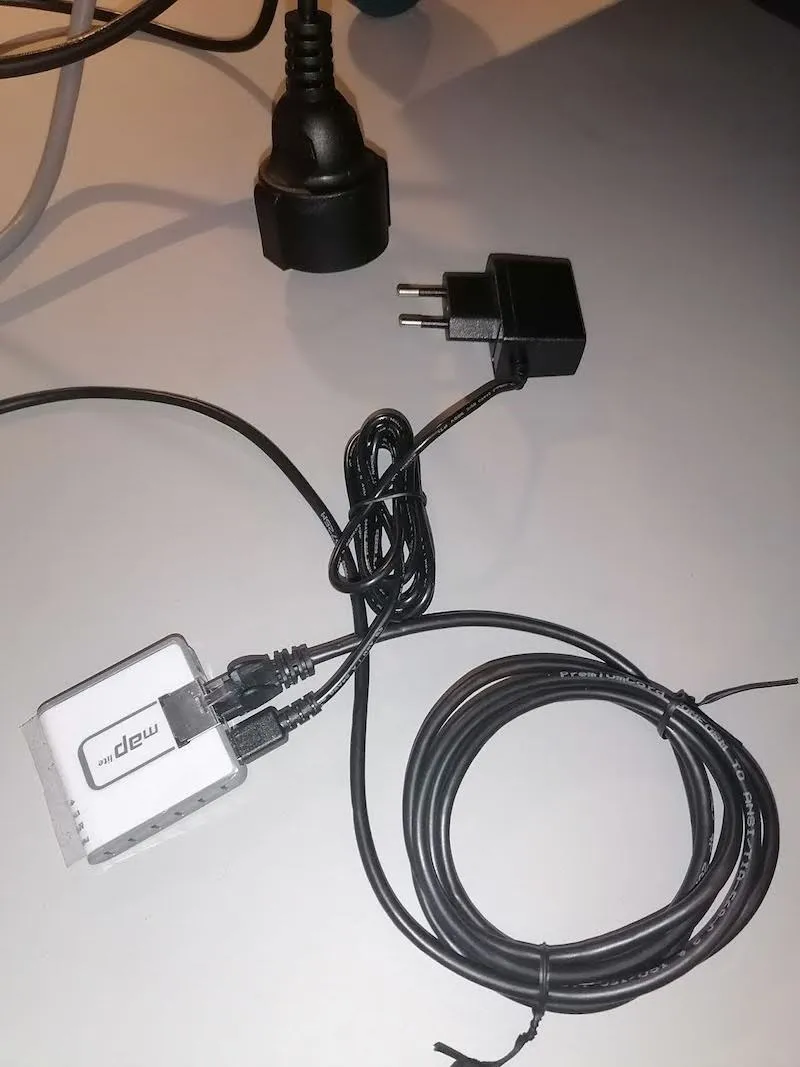
3.2.1. Kõigi Cube V5 / Cube V6 tarvikute ühendamiseks pakkige ruuter pappkarbist lahti ja seejärel paigaldage riiulihoidjad. Järgmisena kinnitage toitekaablid või adapter (olenevalt ruuteri tüübist) ja sisestage ruuter enne selle kinnikeeramist riiuli korpusesse.

3.2.2. Kinnitage pistikupesa riiuli tagaküljel oleva alumise osa külge, kinnitades selle kruvidega.

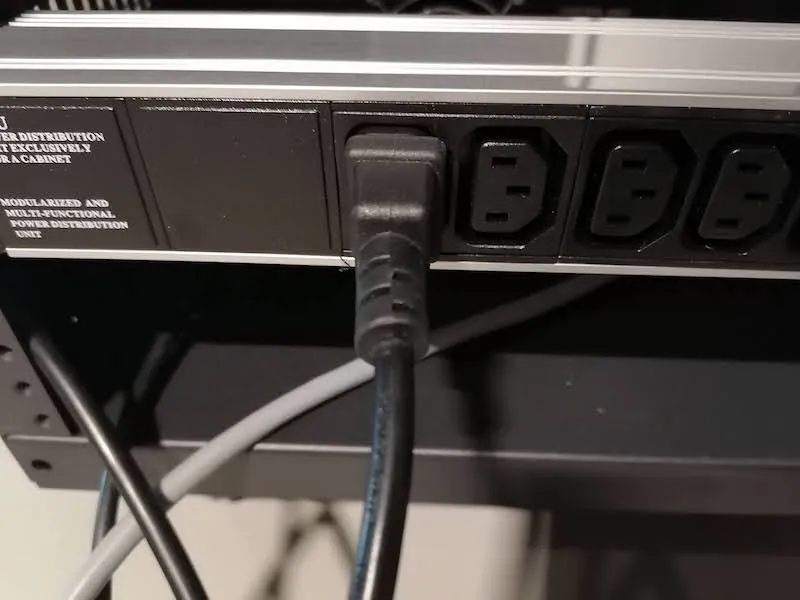
3.2.3. Kui kaasasoleval ruuteril on toiteadapter, leidke toiteadapteri liides ja ühendage see mis tahes toitepistikupesaga.



3.2.4. Leidke juhtseadme toitekaabli vaba ots ja kinnitage see mitme pistikupessa.
3.2.5. Kasutage pikimat Etherneti kaablit, ühendage kaabel oma stuudio andmesidepistikupessa. Pange tähele, et vaikimisi eeldatakse, et Interneti-ühendus on selle andmepistikupesa kaudu saadaval ja seetõttu saadakse IP-aadress automaatselt.


3.2.6. Ühendage Etherneti kaabli teine ots ruuteri viimasesse porti. Kasutage olenevalt ruuteri tüübist kas porti number 10 või porti number 13.
3.2.7. Järgmisena ühendage juhtploki Etherneti kaabli vaba ots ruuterisse, kasutades mis tahes porti numbrit 1-9.
3.2.8. Leidke toiteadapteri liides ja ühendage see mitme pistikupessa.
3.2.9. Võtke Wi-Fi-moodul pappkarbist välja ja leidke Wi-Fi-mooduli külge kinnitamiseks veel üks 2-meetrine Etherneti kaabel. Etherneti kaabli teine ots kinnitub ruuteri külge, kasutades mis tahes pordi numbrit 1-9.



3.2.10. Järgmiseks, kui kasutate Fomei välke, pakkige Fomei Wi-Fi muundur ja toiteadapter lahti ning ühendage seadmed. Kui kasutate Broncolori tulesid, vaadake jaotist PhotoRobot – Broncolori tulede haldamine.

3.2.11. Ühendage toiteadapteri liides mitme pistikupessa ja seejärel ühendage adapter. Kaabli teine ots ühendub ruuteriga, kasutades mis tahes pordi numbrit 1-9.

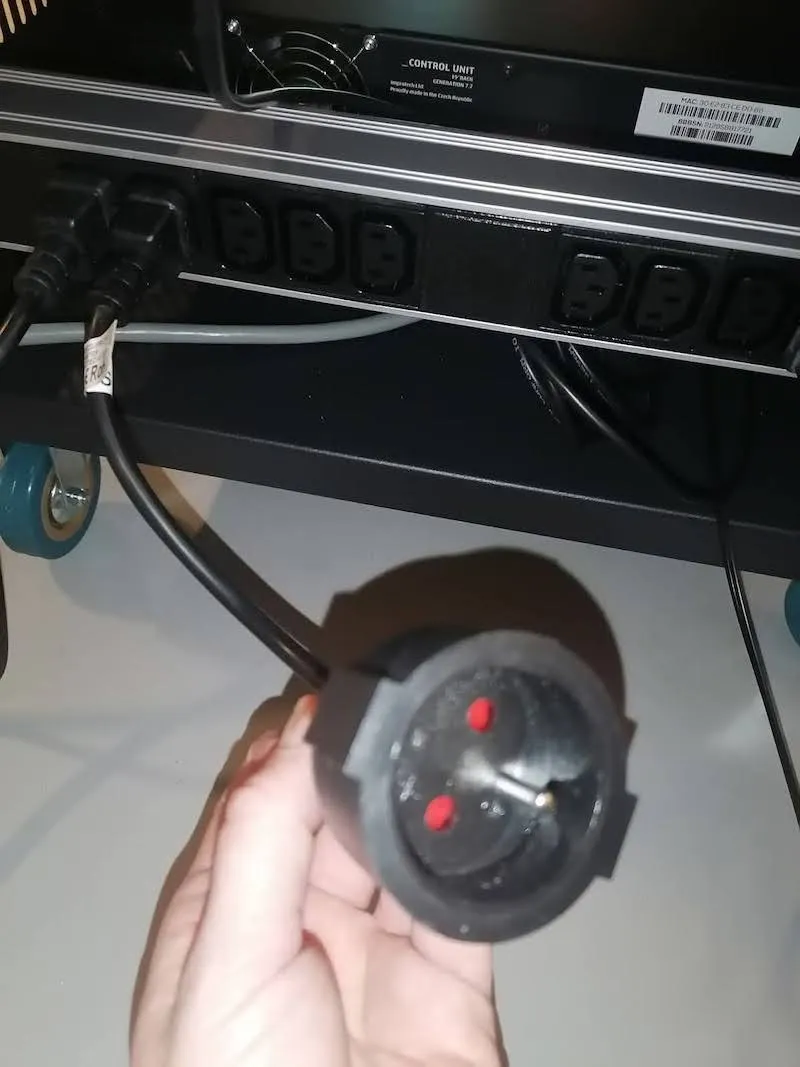
3.2.12. Ühendage pistikupesa pistik seinakontakti.

3.2.13. Leidke katiku kaabli otsa variant, mis sobib teie kaamera mudeliga, ja ühendage see katiku kaabli siduriga.


3.3. Paberi tausta kokkupanek
3.3.1. Paberi tausta kokkupanekuks otsige kõigepealt kaks Master LS 13-B valgustialust. Seejärel paigaldage iga aluse peale W-2 kinnituskahvlid laiendaja naastude komplekti jaoks.



3.3.2. Asetage paberi taust koos naastudega kahe statiivi kinnituskahvlitele. Üks hoiab tausta vasakut külge ja teine tausta paremat külge.

3.3.3. Järgmisena vaadake naastukomplekti paigaldamise ekraanisalvestust ja korrake videos toodud samme.

3.4. Kuubiku V5 / V6 roboti kokkupanek
3.4.1. Cube'i roboti konfigureerimiseks pöörleva mannekeeni torso hoidiku toetamiseks alustage roboti lahtipakkimisest ja selle nelja jala kinnitamisest seadme põhja külge.


3.4.2. Järgmisena ühendage mootorikaabli teine ots kuubikuga, kinnitades mõlemad kruvid pistiku külge.


3.4.3. Pärast seadme ühendamist aseta Cube'i robot maapinnale valge tausta keskele. Asetage kuubik paberist 1 meetri kaugusele.
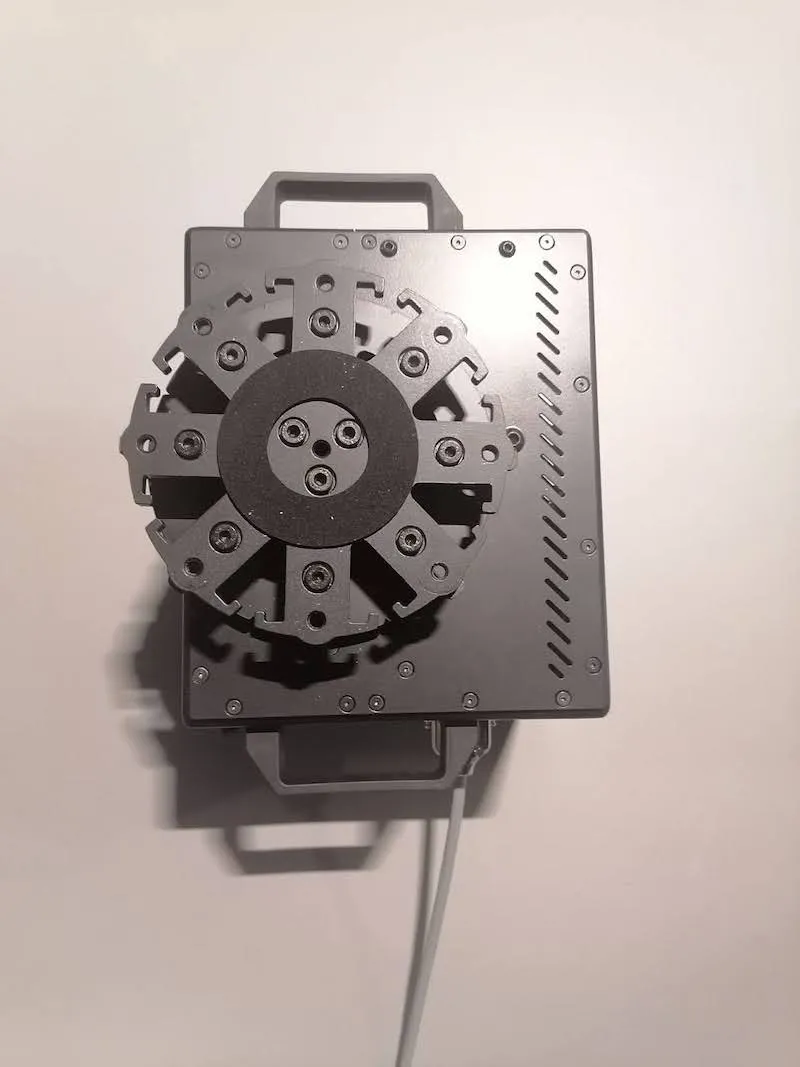

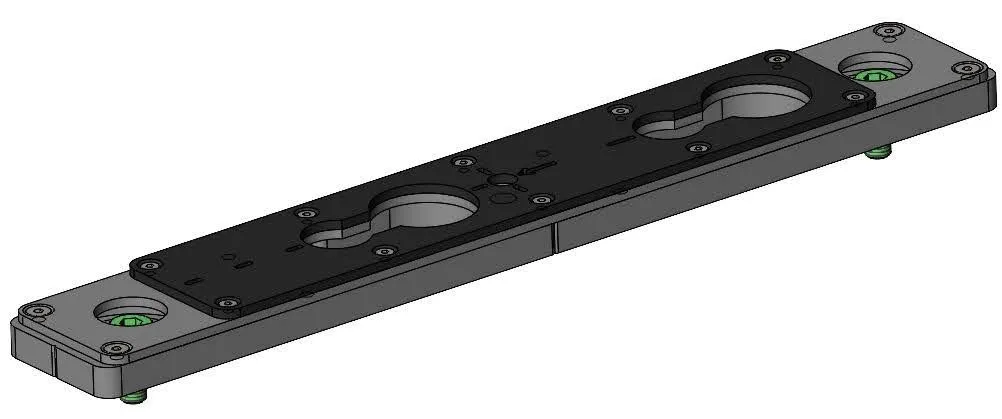
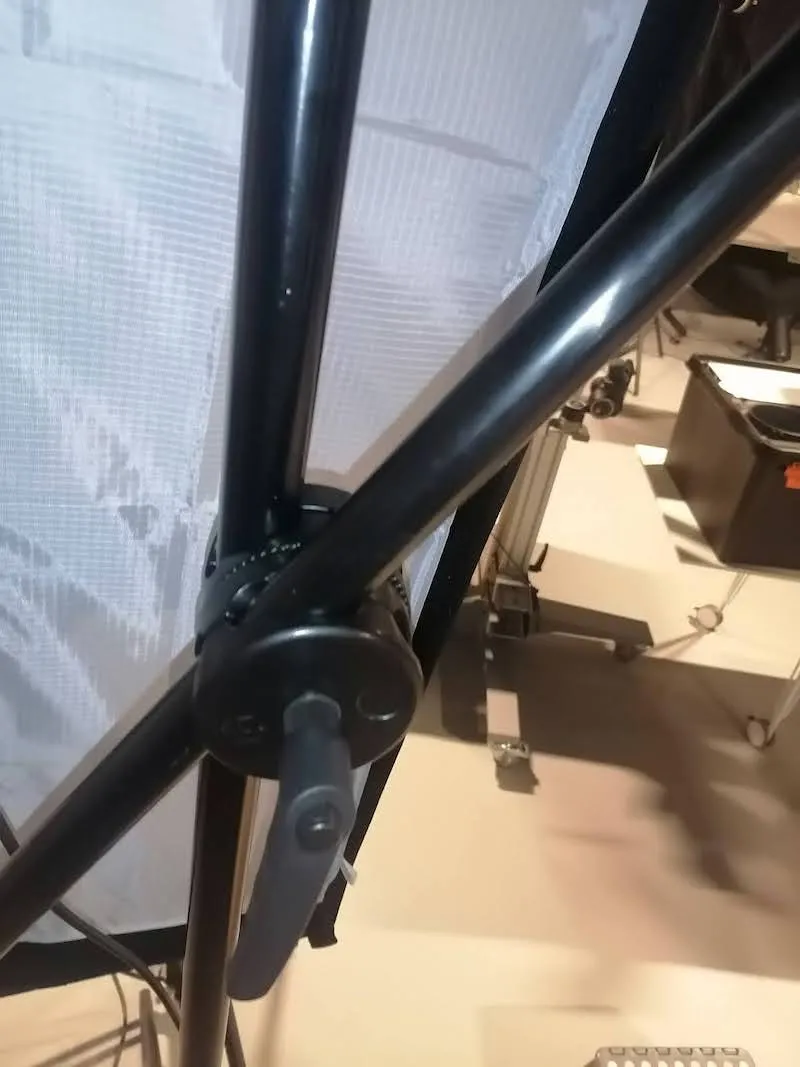
3.4.4. Asetage torsohoidiku reduktorplaat kuubikuroboti ülaosale ja kinnitage see nelja kaasasoleva kruviga.
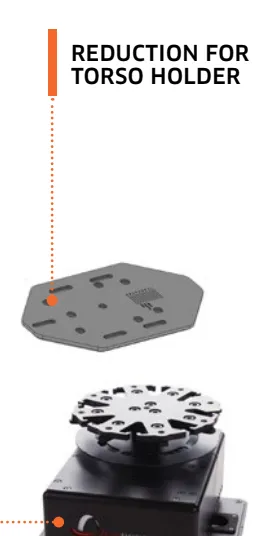
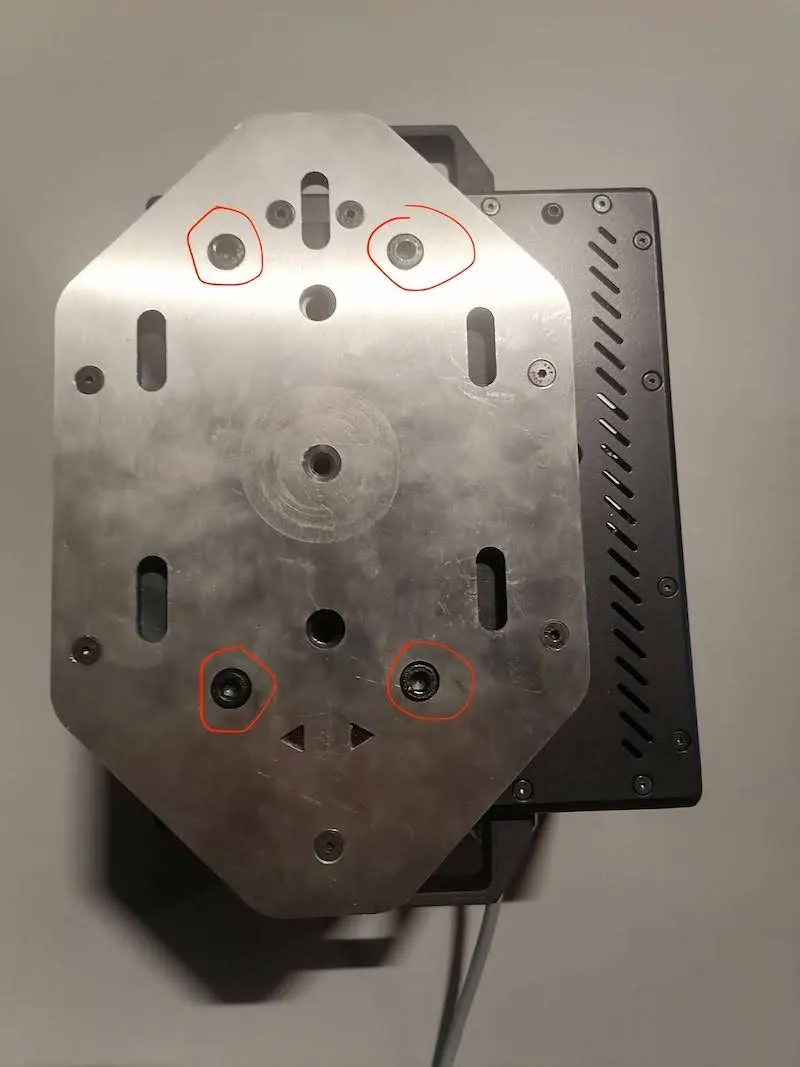
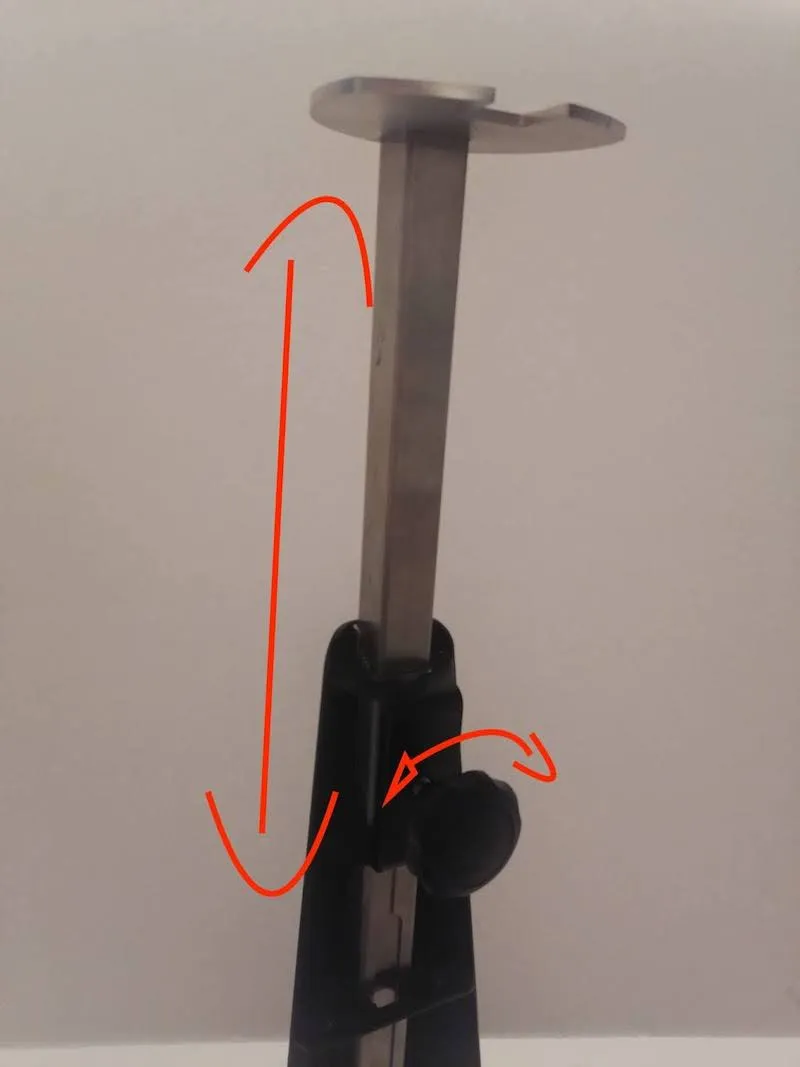
3.4.5. Asetage torsohoidja korpus vähendamisplaadile ja kinnitage torsohoidja suure käsikruviga oma kohale.


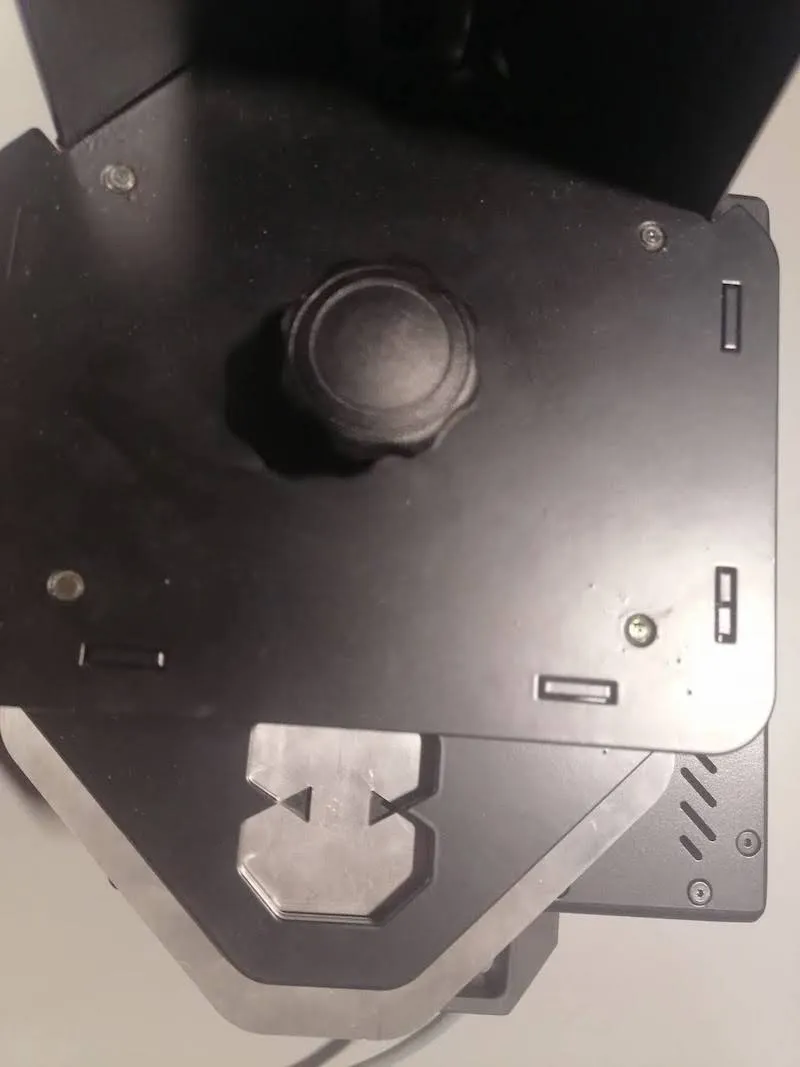
Tähtis: Sellele sammule on vaja hoolikalt tähelepanu pöörata. Veenduge, et vähendamisplaadil olevad kolmnurga sümbolid on torsohoidiku kaudu nähtavad. See tähendab, et torsohoidik on õigesti paigaldatud.
3.4.6. Siinkohal tuleb tähele panna, et torso kõrgust saab reguleerida käsikruvi lõdvendamise ja pingutamisega ning pikendust kõrgemale või madalamale libistades.
3.5. Välklampide seadistamine
3.5.1. Välklampide seadistamiseks Cube'i robotiga pakkige esmalt välklambid karbist välja ja seejärel sisestage pilootpirn igasse välklampi.


Märkus: Pilootpirni sisestamiseks keerake klaas ettevaatlikult vooluvõrgust lahti. Seejärel tehke sama põhipirni klaasikaitsega, enne kui võtate pilootpirni pappkarbist välja. Kasutage pilootpirni käsitsemisel kindlasti salvrätikut või lappi, vastasel juhul võib selle eluiga drastiliselt lüheneda. Järgmisena sisestage pilootpirn ühendusse täpselt selles asendis, nagu järgmistel fotodel.




Kui olete valmis, ärge unustage klaasikaitset tagasi panna ja seejärel korrake iga valgusti kokkupanekuks eelmisi samme.

3.5.2. Pärast pilootpirnide paigaldamist ja klaasikaitsmete vahetamist ühendage toitekaablid kõigi välklampidega.


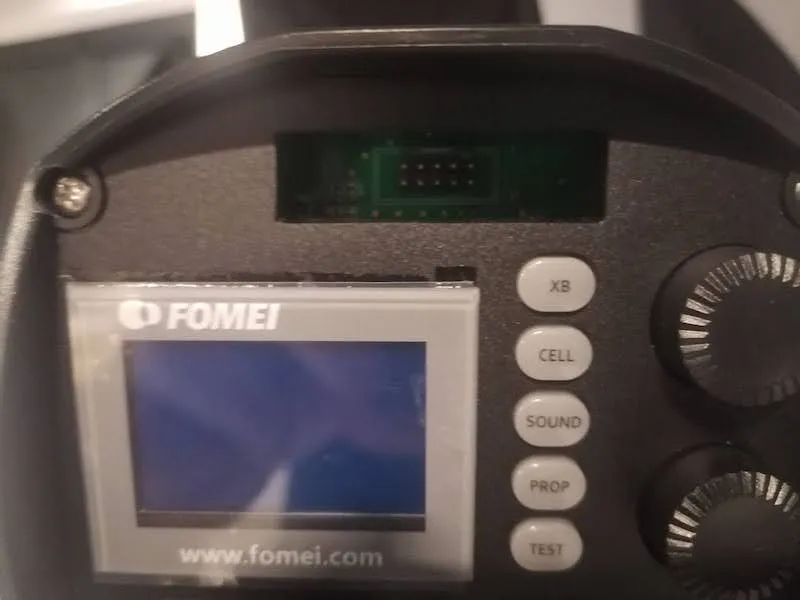
3.5.3. Seejärel sisestage vastuvõtjad igasse valgustisse ja jälgige orienteerumiseks FOMEI silte.


3.5.4. Ühendage toitekaablite vabad otsad tuledest pistikupessa.


3.5.5. Lülitage kõigi välklampide toide sisse.

3.5.6. Asetage tuled füüsiliselt roboti ümber järgmiste soovitatud tulede seadistusega.
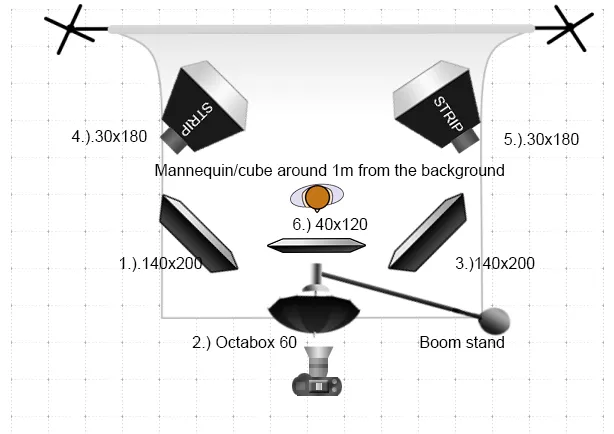
3.5.7. Pange tähele, et kui poomi tugijalg on paigaldatud soovitatud tulede seadistuse kohaselt, tuleb esmalt ehitada poomi tugijalg. Poomi aluse ehitamiseks vajate statiivi, 1,5-meetrist seinapoomi posti ja seinapoomikomplekti.



Lisaks vaadake poomi aluse ehitamise kohta järgmisi pilte.
a) Seinapoomi pooluse klamber:
b) Raskuse tasakaalustamine varda otsas valguse toetamiseks:

c) Illustreeriv pilt ehitatud poomialusest:

4. PhotoRobot _Controls tarkvara
Tarkvara PhotoRobot _Controls App võimaldab juhtida kogu Cube V5 / V6 / Compact robottööjaama. See hõlmab kõigi robotite, kaamerate ja valgustuse kaugjuhtimist. Tarkvara haldab töövoogu ja pakub vajalikke funktsioone tõhusaks automatiseerimiseks järeltöötluse valdkonnas.
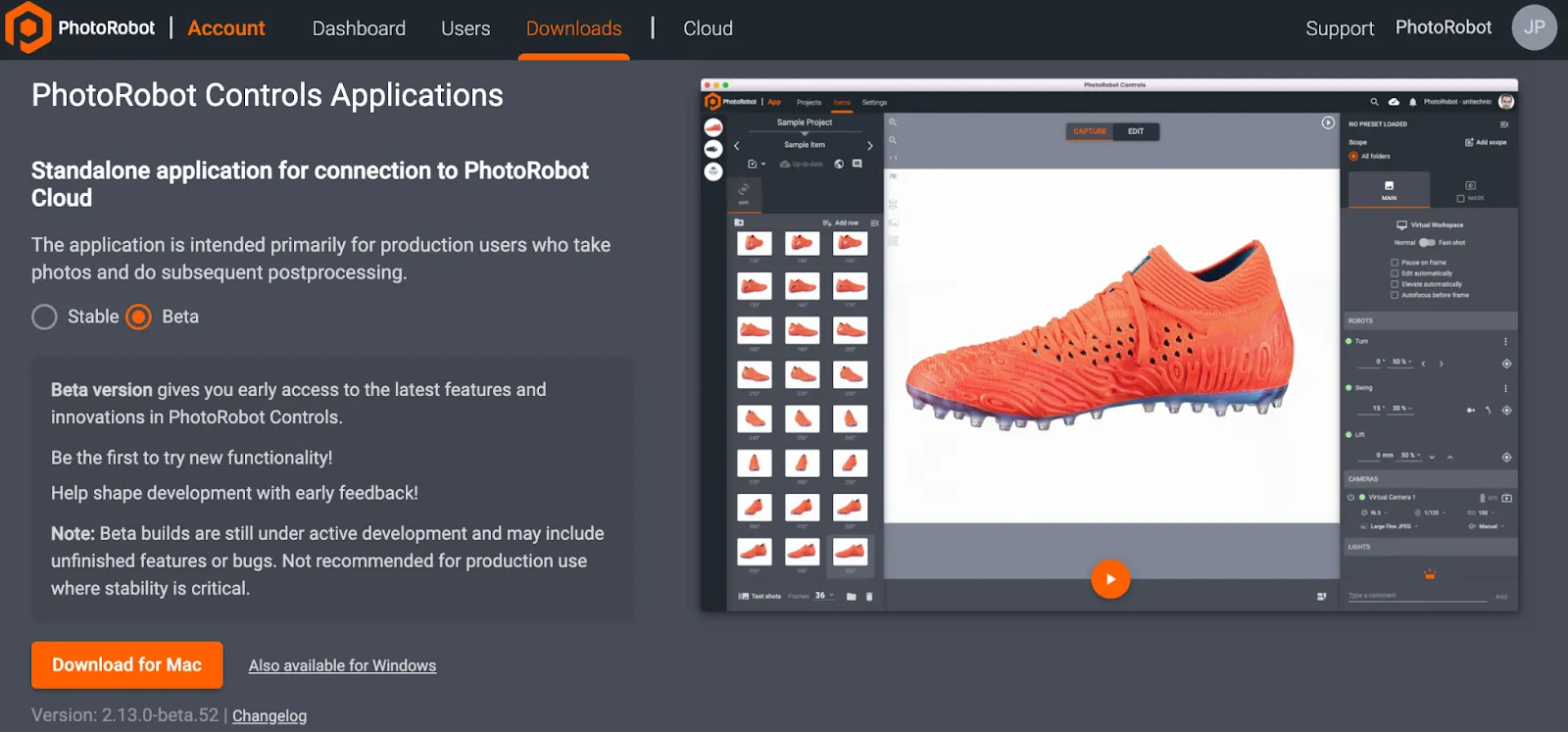
PhotoRobot _Controls rakenduse tarkvara on allalaadimiseks saadaval teie PhotoRobot konto kaudu. See ei kuulu masina komplekti. PhotoRobot _Controls Rakenduse tarkvara ostetakse seadmest eraldi.
Lisaks pidage pärast tarkvararakenduse käivitamist meeles, et liides võib automaatselt käivituda viisardi režiimis. Viisardi režiim on lihtsustatud kasutajaliides. See võimaldab näiteks skaneerida vöötkoode, et tuvastada objekte ning alustada automaatselt jäädvustamist ja järeltöötlust.
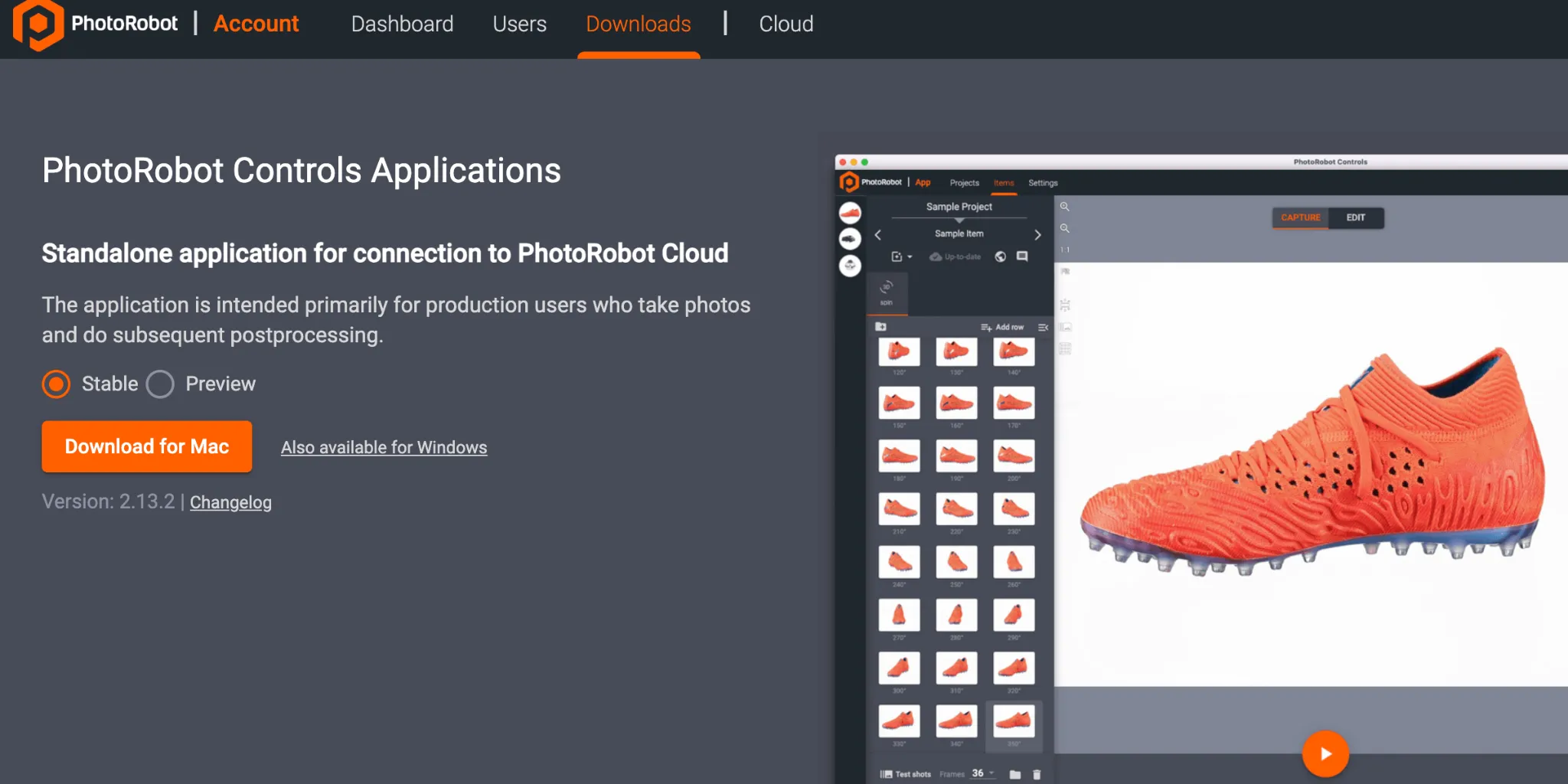
Märkus: Nii CAPP-i stabiilne versioon kui ka eelvaade on allalaadimiseks saadaval installiviisardi kaudu. Stabiilne versioon sisaldab CAPP-i uusimat versiooni ja saab sageli versioone. Samal ajal pakub CAPP-i eelvaateversioon varajast juurdepääsu uusimatele funktsioonidele ja parandustele, mis kantakse stabiilsele versioonile üle mõne päeva jooksul pärast arendamist. See võimaldab kasutajatel enne toega ühendust võtmist testida kõiki eelvaateversioonis ilmnevaid probleeme, kuna enamik stabiilse versiooni teatatud probleeme on eelvaateversioonis juba lahendatud. Pidage siiski meeles, et eelvaateversiooni ei soovitata kasutada tootmises, kus stabiilsus on kriitiline tegur. Eelvaate versioon on aktiivses arenduses, mis võib endiselt sisaldada mittetäielikke funktsioone või lahendamata vigu.
Tähtis: CAPP-i vanemad versioonid ei ole mõeldud klientidele ega avalikuks levitamiseks andmebaasi riknemise ohu tõttu. CAPP-i vanemad versioonid on kättesaadavad ainult volitatud PhotoRobot tehnikutele sisemiseks arenduseks või äärmiselt erilistel kasutusjuhtudel. CAPP-i uusima stabiilse versiooni ja eelvaateversiooni leidmiseks vaadake jaotist CAPP-i uusimad allalaaditavad versioonid.
Rakenduse PhotoRobot _Controls toe või tõrkeotsingu kohta vaadake PhotoRobot Alustamine.
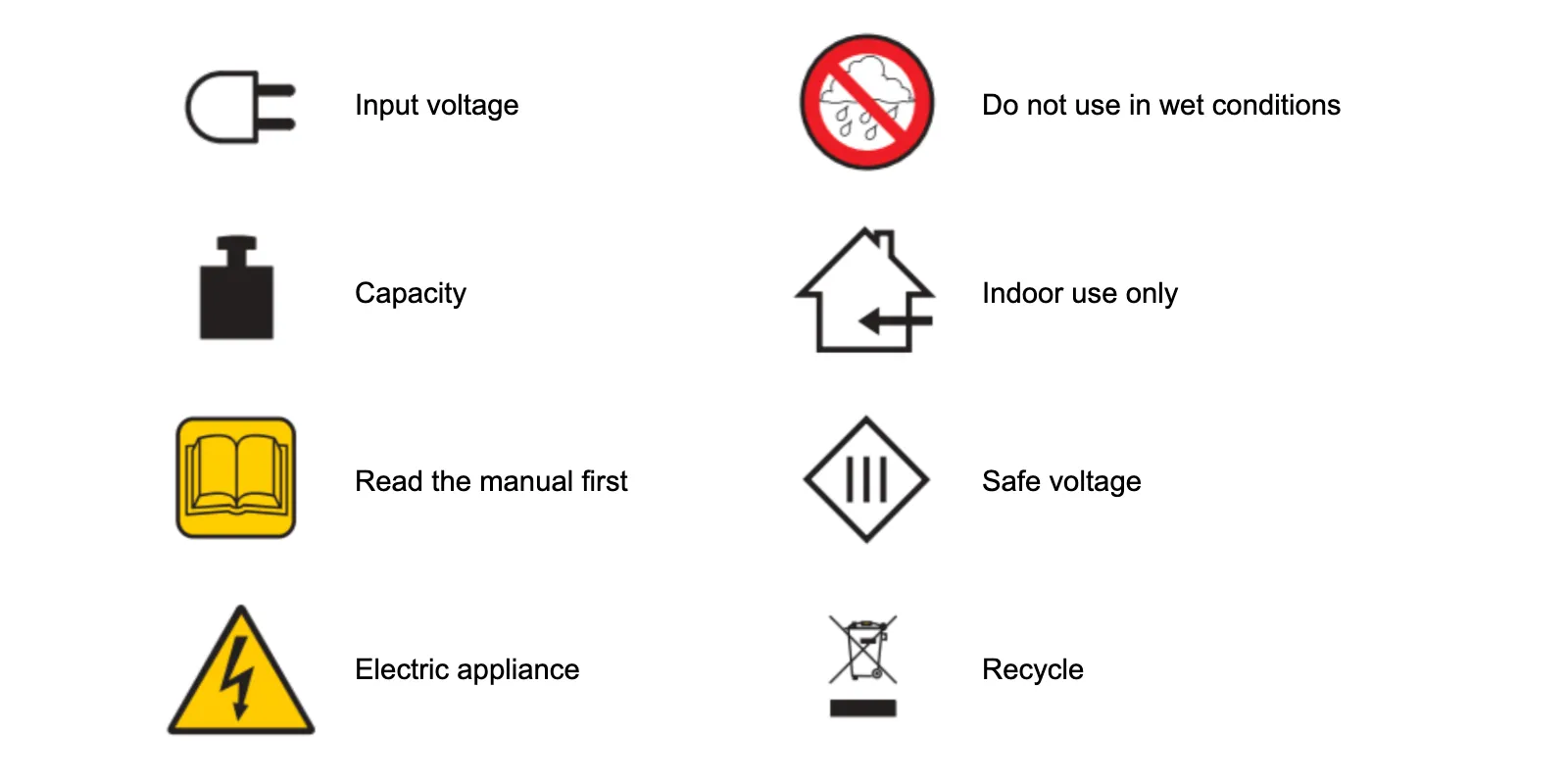
5. Teabesildid
5.1. Sümbolite ülevaade
5.2. Kuubiku kompaktsed sildid



EOS Rebel seeria


EOS DSLR-seeria


EOS M peeglita seeria


PowerShot seeria


Lähivõte / käeshoitav

Canon EOS Rebel seeria pakub algajasõbralikke digipeegelkaameraid, millel on kindel pildikvaliteet, intuitiivsed juhtnupud ja mitmekülgsed funktsioonid. Need kaamerad, mis sobivad ideaalselt fotograafiahuvilistele, pakuvad usaldusväärset autofookust, muudetava nurgaga puuteekraane ja Full HD või 4K videosalvestust.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS digipeegelkaamerate seeria pakub kvaliteetseid pilte, kiiret automaatteravustamist ja mitmekülgsust, muutes selle ideaalseks nii fotograafia kui ka videote tegemiseks.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni EOS M peeglita seeria ühendab kompaktse disaini digipeegelkaameraga sarnase jõudlusega. Vahetatavate objektiivide, kiire autofookuse ja kvaliteetsete pildianduritega kaamerad sobivad suurepäraselt reisijatele ja sisuloojatele, kes otsivad kaasaskantavust ilma pildikvaliteeti ohverdamata.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni PowerShoti seeria pakub kompaktseid ja kasutajasõbralikke kaameraid juhuslikele pildistajatele ja entusiastidele. Mudelid, mis ulatuvad lihtsatest sihi-ja-pildista kuni täiustatud suumkaamerateni, pakuvad mugavust, kindlat pildikvaliteeti ja selliseid funktsioone nagu pildistabilisaator ja 4K-video.
Ühendus
Eraldusvõime (MP)
Otsus
Canoni lähivõtete ja käeshoitavad kaamerad on loodud üksikasjalikeks, lähedalt pildistamiseks ja videote tegemiseks. Kompaktsed ja hõlpsasti kasutatavad need pakuvad täpset teravustamist, kõrge eraldusvõimega pildistamist ja mitmekülgseid makrofunktsioone – ideaalsed vlogimiseks, tootepildistamiseks ja loomingulisteks lähivõteteks.


